Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast robust peg-in-hole insertion with continuous visual servoing
Paper and Code
Nov 12, 2020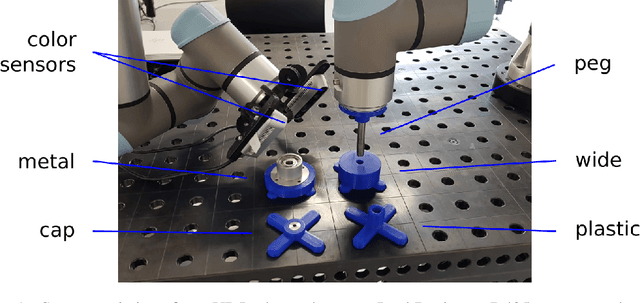
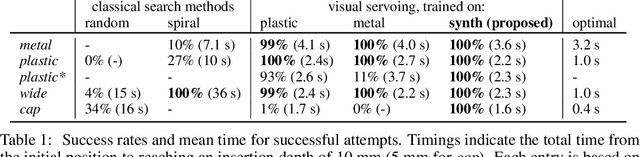
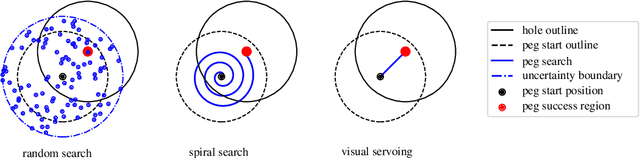

This paper demonstrates a visual servoing method which is robust towards uncertainties related to system calibration and grasping, while significantly reducing the peg-in-hole time compared to classical methods and recent attempts based on deep learning. The proposed visual servoing method is based on peg and hole point estimates from a deep neural network in a multi-cam setup, where the model is trained on purely synthetic data. Empirical results show that the learnt model generalizes to the real world, allowing for higher success rates and lower cycle times than existing approaches.
View paper on