 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiquid Time-constant Recurrent Neural Networks as Universal Approximators
Nov 01, 2018In this paper, we introduce the notion of liquid time-constant (LTC) recurrent neural networks (RNN)s, a subclass of continuous-time RNNs, with varying neuronal time-constant realized by their nonlinear synaptic transmission model. This feature is inspired by the communication principles in the nervous system of small species. It enables the model to approximate continuous mapping with a small number of computational units. We show that any finite trajectory of an $n$-dimensional continuous dynamical system can be approximated by the internal state of the hidden units and $n$ output units of an LTC network. Here, we also theoretically find bounds on their neuronal states and varying time-constant.
Re-purposing Compact Neuronal Circuit Policies to Govern Reinforcement Learning Tasks
Sep 11, 2018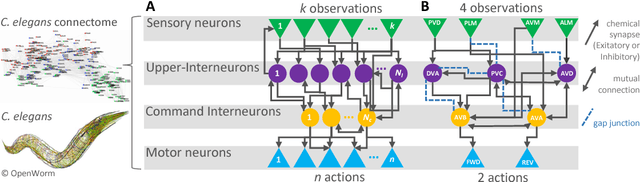


We propose an effective method for creating interpretable control agents, by \textit{re-purposing} the function of a biological neural circuit model, to govern simulated and real world reinforcement learning (RL) test-beds. Inspired by the structure of the nervous system of the soil-worm, \emph{C. elegans}, we introduce \emph{Neuronal Circuit Policies} (NCPs) as a novel recurrent neural network instance with liquid time-constants, universal approximation capabilities and interpretable dynamics. We theoretically show that they can approximate any finite simulation time of a given continuous n-dimensional dynamical system, with $n$ output units and some hidden units. We model instances of the policies and learn their synaptic and neuronal parameters to control standard RL tasks and demonstrate its application for autonomous parking of a real rover robot on a pre-defined trajectory. For reconfiguration of the \emph{purpose} of the neural circuit, we adopt a search-based RL algorithm. We show that our neuronal circuit policies perform as good as deep neural network policies with the advantage of realizing interpretable dynamics at the cell-level. We theoretically find bounds for the time-varying dynamics of the circuits, and introduce a novel way to reason about networks' dynamics.
Response Characterization for Auditing Cell Dynamics in Long Short-term Memory Networks
Sep 11, 2018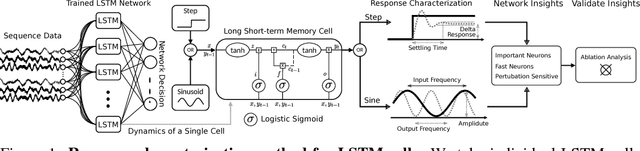
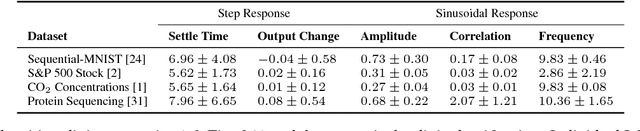


In this paper, we introduce a novel method to interpret recurrent neural networks (RNNs), particularly long short-term memory networks (LSTMs) at the cellular level. We propose a systematic pipeline for interpreting individual hidden state dynamics within the network using response characterization methods. The ranked contribution of individual cells to the network's output is computed by analyzing a set of interpretable metrics of their decoupled step and sinusoidal responses. As a result, our method is able to uniquely identify neurons with insightful dynamics, quantify relationships between dynamical properties and test accuracy through ablation analysis, and interpret the impact of network capacity on a network's dynamical distribution. Finally, we demonstrate generalizability and scalability of our method by evaluating a series of different benchmark sequential datasets.
Neuronal Circuit Policies
Mar 22, 2018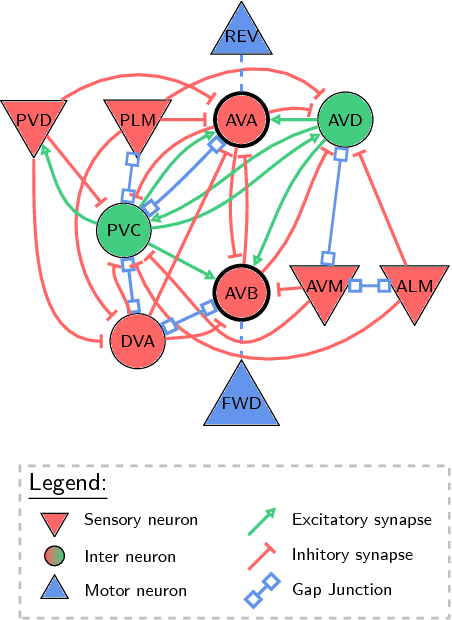

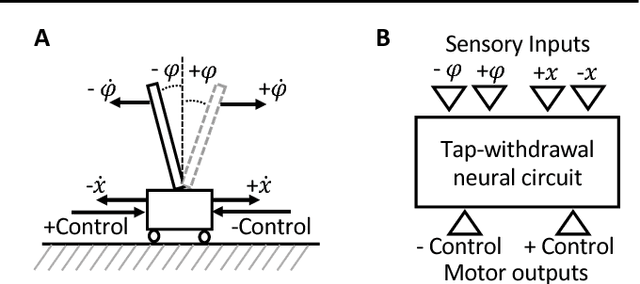

We propose an effective way to create interpretable control agents, by re-purposing the function of a biological neural circuit model, to govern simulated and real world reinforcement learning (RL) test-beds. We model the tap-withdrawal (TW) neural circuit of the nematode, C. elegans, a circuit responsible for the worm's reflexive response to external mechanical touch stimulations, and learn its synaptic and neuronal parameters as a policy for controlling basic RL tasks. We also autonomously park a real rover robot on a pre-defined trajectory, by deploying such neuronal circuit policies learned in a simulated environment. For reconfiguration of the purpose of the TW neural circuit, we adopt a search-based RL algorithm. We show that our neuronal policies perform as good as deep neural network policies with the advantage of realizing interpretable dynamics at the cell level.
Worm-level Control through Search-based Reinforcement Learning
Nov 09, 2017
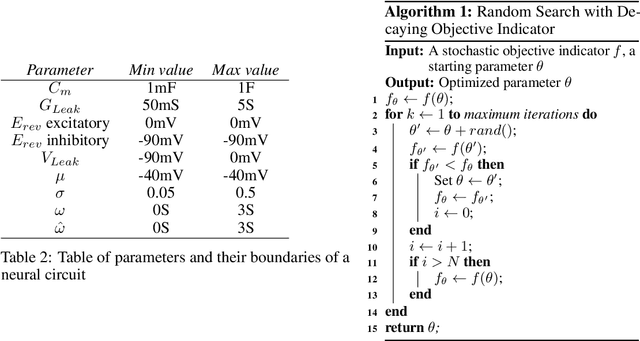
Through natural evolution, nervous systems of organisms formed near-optimal structures to express behavior. Here, we propose an effective way to create control agents, by \textit{re-purposing} the function of biological neural circuit models, to govern similar real world applications. We model the tap-withdrawal (TW) neural circuit of the nematode, \textit{C. elegans}, a circuit responsible for the worm's reflexive response to external mechanical touch stimulations, and learn its synaptic and neural parameters as a policy for controlling the inverted pendulum problem. For reconfiguration of the purpose of the TW neural circuit, we manipulate a search-based reinforcement learning. We show that our neural policy performs as good as existing traditional control theory and machine learning approaches. A video demonstration of the performance of our method can be accessed at \url{https://youtu.be/o-Ia5IVyff8}.
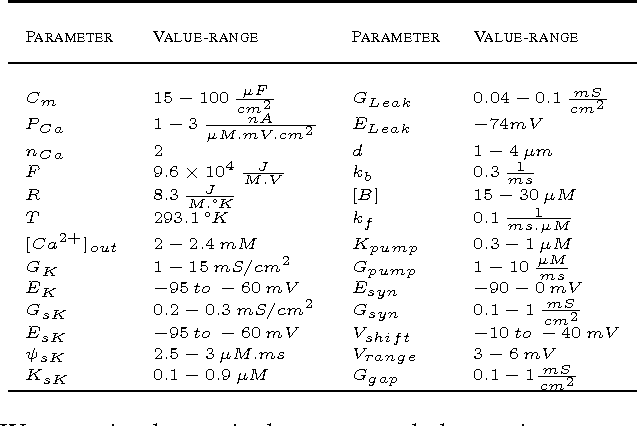
Searching for Biophysically Realistic Parameters for Dynamic Neuron Models by Genetic Algorithms from Calcium Imaging Recording
Nov 04, 2017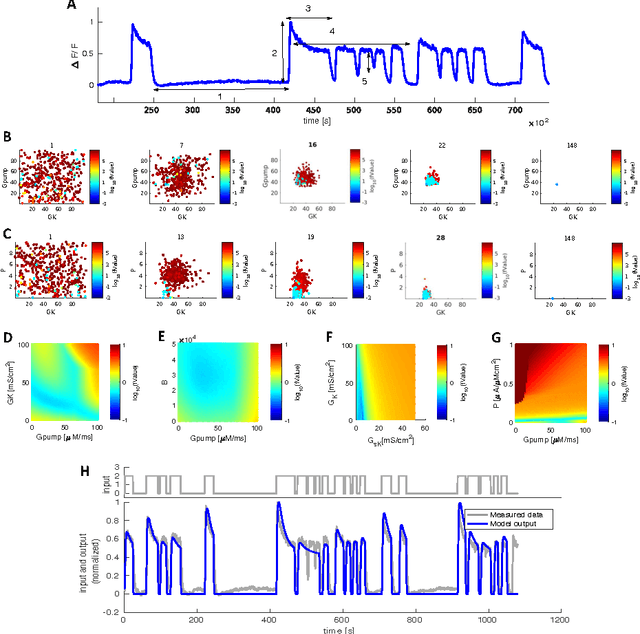
Individual Neurons in the nervous systems exploit various dynamics. To capture these dynamics for single neurons, we tune the parameters of an electrophysiological model of nerve cells, to fit experimental data obtained by calcium imaging. A search for the biophysical parameters of this model is performed by means of a genetic algorithm, where the model neuron is exposed to a predefined input current representing overall inputs from other parts of the nervous system. The algorithm is then constrained for keeping the ion-channel currents within reasonable ranges, while producing the best fit to a calcium imaging time series of the AVA interneuron, from the brain of the soil-worm, C. elegans. Our settings enable us to project a set of biophysical parameters to the the neuron kinetics observed in neuronal imaging.
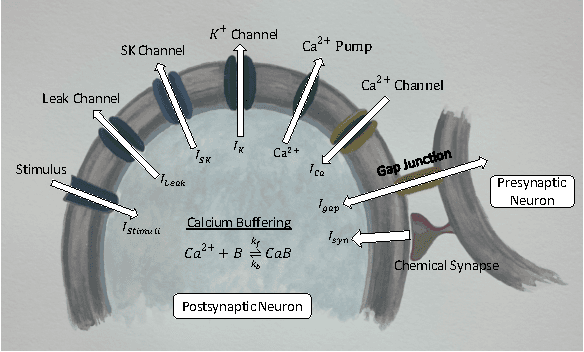
Non-Associative Learning Representation in the Nervous System of the Nematode Caenorhabditis elegans
Mar 25, 2017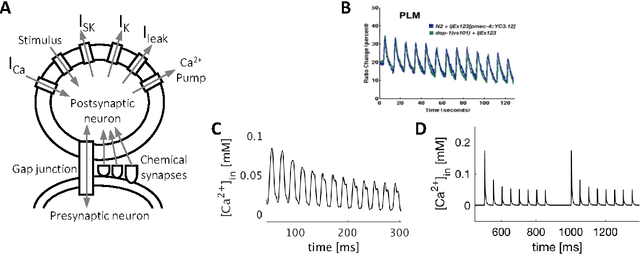
Caenorhabditis elegans (C. elegans) illustrated remarkable behavioral plasticities including complex non-associative and associative learning representations. Understanding the principles of such mechanisms presumably leads to constructive inspirations for the design of efficient learning algorithms. In the present study, we postulate a novel approach on modeling single neurons and synapses to study the mechanisms underlying learning in the C. elegans nervous system. In this regard, we construct a precise mathematical model of sensory neurons where we include multi-scale details from genes, ion channels and ion pumps, together with a dynamic model of synapses comprised of neurotransmitters and receptors kinetics. We recapitulate mechanosensory habituation mechanism, a non-associative learning process, in which elements of the neural network tune their parameters as a result of repeated input stimuli. Accordingly, we quantitatively demonstrate the roots of such plasticity in the neuronal and synaptic-level representations. Our findings can potentially give rise to the development of new bio-inspired learning algorithms.
SIM-CE: An Advanced Simulink Platform for Studying the Brain of Caenorhabditis elegans
Mar 25, 2017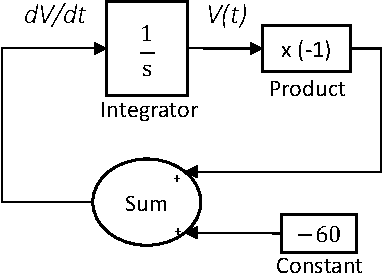
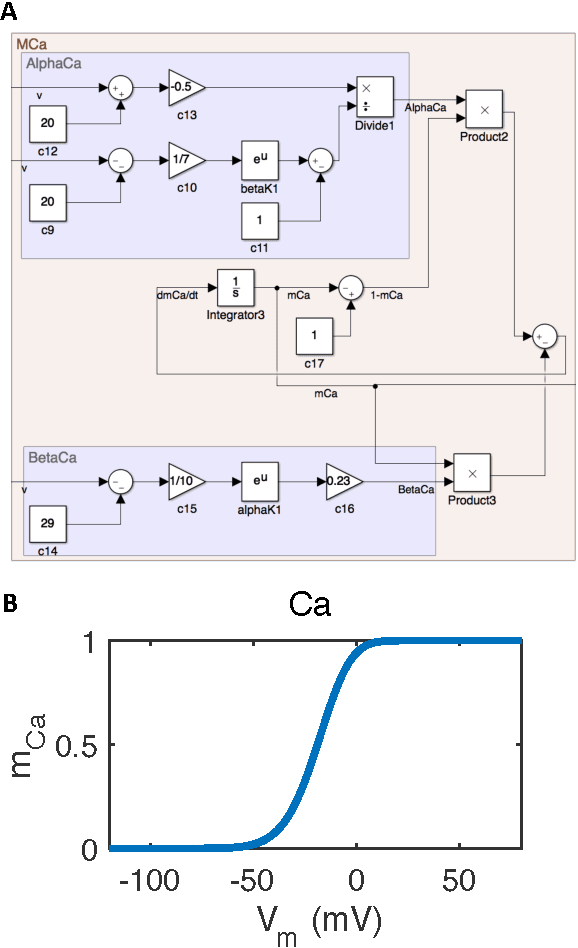
We introduce SIM-CE, an advanced, user-friendly modeling and simulation environment in Simulink for performing multi-scale behavioral analysis of the nervous system of Caenorhabditis elegans (C. elegans). SIM-CE contains an implementation of the mathematical models of C. elegans's neurons and synapses, in Simulink, which can be easily extended and particularized by the user. The Simulink model is able to capture both complex dynamics of ion channels and additional biophysical detail such as intracellular calcium concentration. We demonstrate the performance of SIM-CE by carrying out neuronal, synaptic and neural-circuit-level behavioral simulations. Such environment enables the user to capture unknown properties of the neural circuits, test hypotheses and determine the origin of many behavioral plasticities exhibited by the worm.
An Automated Auto-encoder Correlation-based Health-Monitoring and Prognostic Method for Machine Bearings
Mar 18, 2017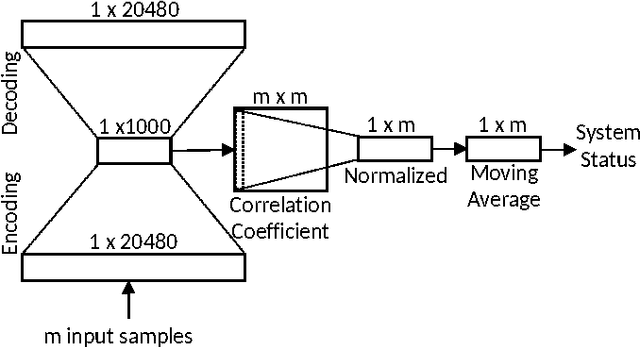

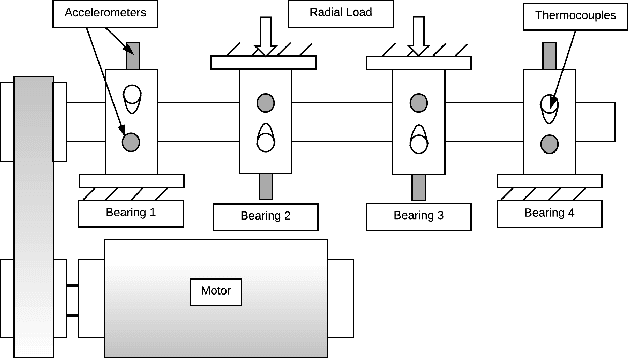
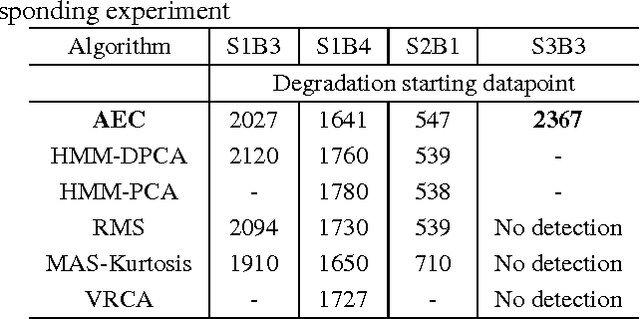
This paper studies an intelligent ultimate technique for health-monitoring and prognostic of common rotary machine components, particularly bearings. During a run-to-failure experiment, rich unsupervised features from vibration sensory data are extracted by a trained sparse auto-encoder. Then, the correlation of the extracted attributes of the initial samples (presumably healthy at the beginning of the test) with the succeeding samples is calculated and passed through a moving-average filter. The normalized output is named auto-encoder correlation-based (AEC) rate which stands for an informative attribute of the system depicting its health status and precisely identifying the degradation starting point. We show that AEC technique well-generalizes in several run-to-failure tests. AEC collects rich unsupervised features form the vibration data fully autonomous. We demonstrate the superiority of the AEC over many other state-of-the-art approaches for the health monitoring and prognostic of machine bearings.
Control of the Correlation of Spontaneous Neuron Activity in Biological and Noise-activated CMOS Artificial Neural Microcircuits
Feb 24, 2017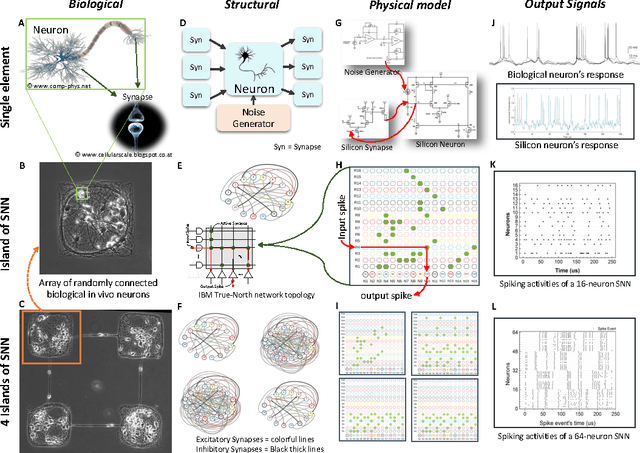
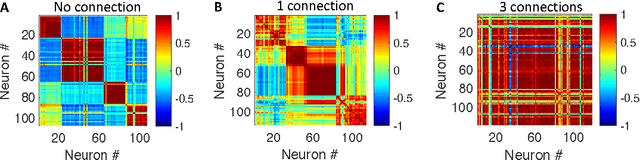
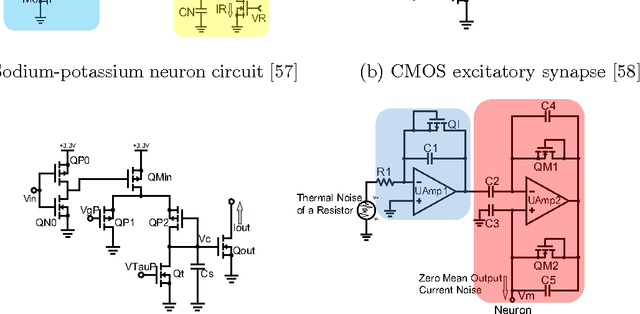
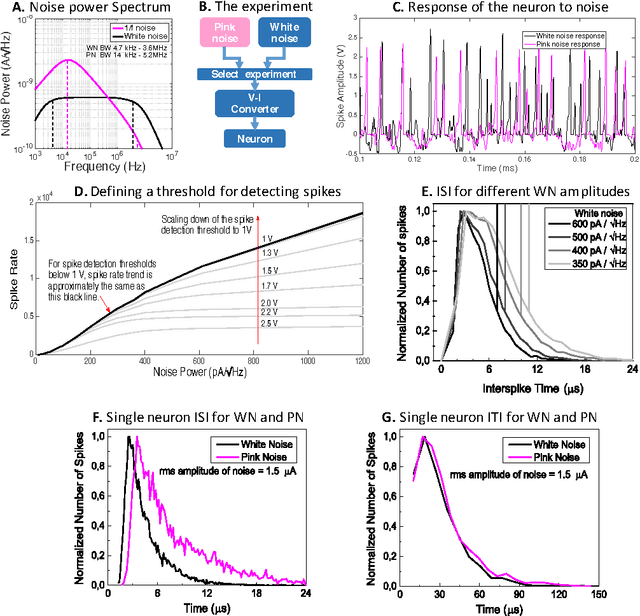
There are several indications that brain is organized not on a basis of individual unreliable neurons, but on a micro-circuital scale providing Lego blocks employed to create complex architectures. At such an intermediate scale, the firing activity in the microcircuits is governed by collective effects emerging by the background noise soliciting spontaneous firing, the degree of mutual connections between the neurons, and the topology of the connections. We compare spontaneous firing activity of small populations of neurons adhering to an engineered scaffold with simulations of biologically plausible CMOS artificial neuron populations whose spontaneous activity is ignited by tailored background noise. We provide a full set of flexible and low-power consuming silicon blocks including neurons, excitatory and inhibitory synapses, and both white and pink noise generators for spontaneous firing activation. We achieve a comparable degree of correlation of the firing activity of the biological neurons by controlling the kind and the number of connection among the silicon neurons. The correlation between groups of neurons, organized as a ring of four distinct populations connected by the equivalent of interneurons, is triggered more effectively by adding multiple synapses to the connections than increasing the number of independent point-to-point connections. The comparison between the biological and the artificial systems suggests that a considerable number of synapses is active also in biological populations adhering to engineered scaffolds.