 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Learning Framework for Whole-Body Model Predictive Control of a Real Humanoid Robot
Sep 13, 2024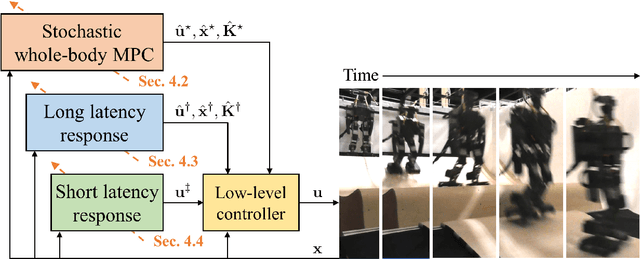
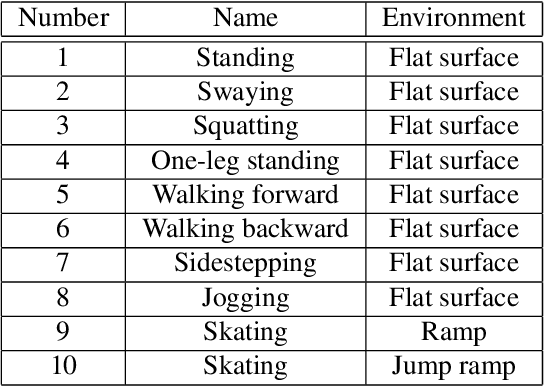
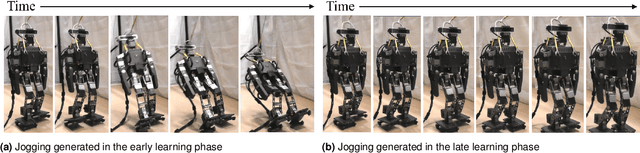
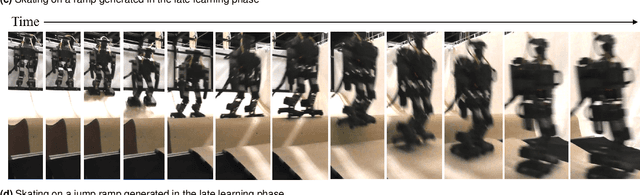
The simulation-to-real gap problem and the high computational burden of whole-body Model Predictive Control (whole-body MPC) continue to present challenges in generating a wide variety of movements using whole-body MPC for real humanoid robots. This paper presents a biologically-inspired hierarchical learning framework as a potential solution to the aforementioned problems. The proposed three-layer hierarchical framework enables the generation of multi-contact, dynamic behaviours even with low-frequency policy updates of whole-body MPC. The upper layer is responsible for learning an accurate dynamics model with the objective of reducing the discrepancy between the analytical model and the real system. This enables the computation of effective control policies using whole-body MPC. Subsequently, the middle and lower layers are tasked with learning additional policies to generate high-frequency control inputs. In order to learn an accurate dynamics model in the upper layer, an augmented model using a deep residual network is trained by model-based reinforcement learning with stochastic whole-body MPC. The proposed framework was evaluated in 10 distinct motion learning scenarios, including jogging on a flat surface and skating on curved surfaces. The results demonstrate that a wide variety of motions can be successfully generated on a real humanoid robot using whole-body MPC through learning with the proposed framework.
Control of the Correlation of Spontaneous Neuron Activity in Biological and Noise-activated CMOS Artificial Neural Microcircuits
Feb 24, 2017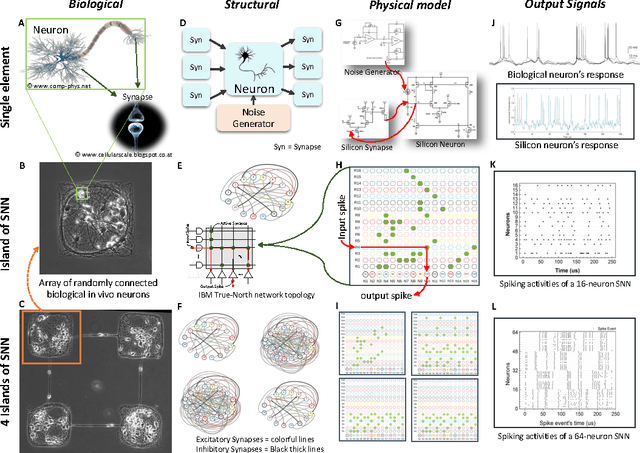
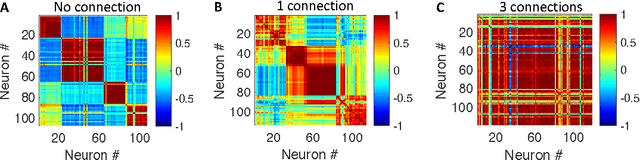
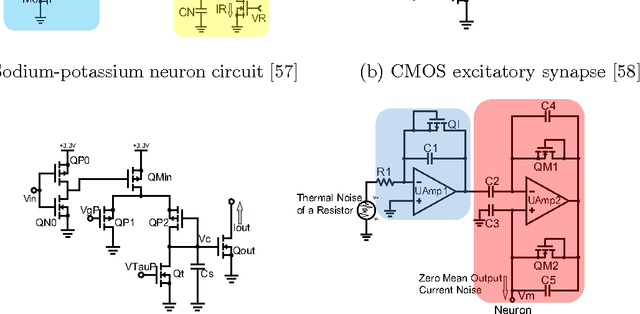
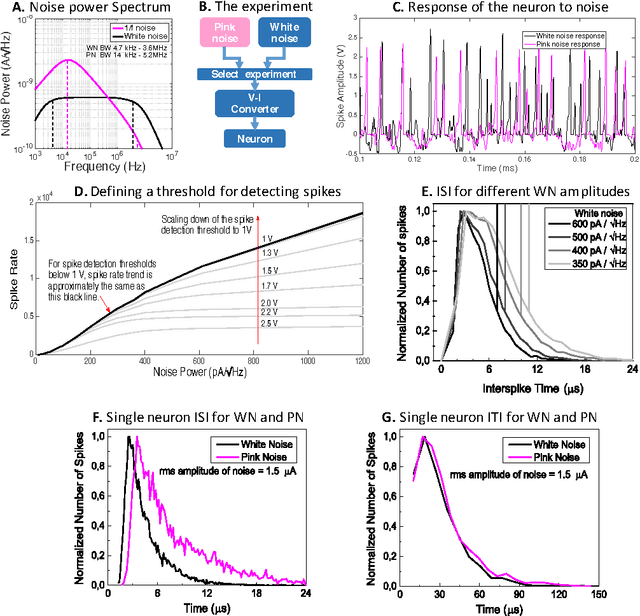
There are several indications that brain is organized not on a basis of individual unreliable neurons, but on a micro-circuital scale providing Lego blocks employed to create complex architectures. At such an intermediate scale, the firing activity in the microcircuits is governed by collective effects emerging by the background noise soliciting spontaneous firing, the degree of mutual connections between the neurons, and the topology of the connections. We compare spontaneous firing activity of small populations of neurons adhering to an engineered scaffold with simulations of biologically plausible CMOS artificial neuron populations whose spontaneous activity is ignited by tailored background noise. We provide a full set of flexible and low-power consuming silicon blocks including neurons, excitatory and inhibitory synapses, and both white and pink noise generators for spontaneous firing activation. We achieve a comparable degree of correlation of the firing activity of the biological neurons by controlling the kind and the number of connection among the silicon neurons. The correlation between groups of neurons, organized as a ring of four distinct populations connected by the equivalent of interneurons, is triggered more effectively by adding multiple synapses to the connections than increasing the number of independent point-to-point connections. The comparison between the biological and the artificial systems suggests that a considerable number of synapses is active also in biological populations adhering to engineered scaffolds.