 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Falsification of Cyber-Physical Systems
May 06, 2025Cyber-Physical Systems (CPS) are abundant in safety-critical domains such as healthcare, avionics, and autonomous vehicles. Formal verification of their operational safety is, therefore, of utmost importance. In this paper, we address the falsification problem, where the focus is on searching for an unsafe execution in the system instead of proving their absence. The contribution of this paper is a framework that (a) connects the falsification of CPS with the falsification of deep neural networks (DNNs) and (b) leverages the inherent interpretability of Decision Trees for faster falsification of CPS. This is achieved by: (1) building a surrogate model of the CPS under test, either as a DNN model or a Decision Tree, (2) application of various DNN falsification tools to falsify CPS, and (3) a novel falsification algorithm guided by the explanations of safety violations of the CPS model extracted from its Decision Tree surrogate. The proposed framework has the potential to exploit a repertoire of \emph{adversarial attack} algorithms designed to falsify robustness properties of DNNs, as well as state-of-the-art falsification algorithms for DNNs. Although the presented methodology is applicable to systems that can be executed/simulated in general, we demonstrate its effectiveness, particularly in CPS. We show that our framework, implemented as a tool \textsc{FlexiFal}, can detect hard-to-find counterexamples in CPS that have linear and non-linear dynamics. Decision tree-guided falsification shows promising results in efficiently finding multiple counterexamples in the ARCH-COMP 2024 falsification benchmarks~\cite{khandait2024arch}.
Exploring Inevitable Waypoints for Unsolvability Explanation in Hybrid Planning Problems
Apr 22, 2025Explaining unsolvability of planning problems is of significant research interest in Explainable AI Planning. AI planning literature has reported several research efforts on generating explanations of solutions to planning problems. However, explaining the unsolvability of planning problems remains a largely open and understudied problem. A widely practiced approach to plan generation and automated problem solving, in general, is to decompose tasks into sub-problems that help progressively converge towards the goal. In this paper, we propose to adopt the same philosophy of sub-problem identification as a mechanism for analyzing and explaining unsolvability of planning problems in hybrid systems. In particular, for a given unsolvable planning problem, we propose to identify common waypoints, which are universal obstacles to plan existence; in other words, they appear on every plan from the source to the planning goal. This work envisions such waypoints as sub-problems of the planning problem and the unreachability of any of these waypoints as an explanation for the unsolvability of the original planning problem. We propose a novel method of waypoint identification by casting the problem as an instance of the longest common subsequence problem, a widely popular problem in computer science, typically considered as an illustrative example for the dynamic programming paradigm. Once the waypoints are identified, we perform symbolic reachability analysis on them to identify the earliest unreachable waypoint and report it as the explanation of unsolvability. We present experimental results on unsolvable planning problems in hybrid domains.
NTIRE 2025 Challenge on Image Super-Resolution ($\times$4): Methods and Results
Apr 20, 2025This paper presents the NTIRE 2025 image super-resolution ($\times$4) challenge, one of the associated competitions of the 10th NTIRE Workshop at CVPR 2025. The challenge aims to recover high-resolution (HR) images from low-resolution (LR) counterparts generated through bicubic downsampling with a $\times$4 scaling factor. The objective is to develop effective network designs or solutions that achieve state-of-the-art SR performance. To reflect the dual objectives of image SR research, the challenge includes two sub-tracks: (1) a restoration track, emphasizes pixel-wise accuracy and ranks submissions based on PSNR; (2) a perceptual track, focuses on visual realism and ranks results by a perceptual score. A total of 286 participants registered for the competition, with 25 teams submitting valid entries. This report summarizes the challenge design, datasets, evaluation protocol, the main results, and methods of each team. The challenge serves as a benchmark to advance the state of the art and foster progress in image SR.
Fast Falsification of Neural Networks using Property Directed Testing
Apr 26, 2021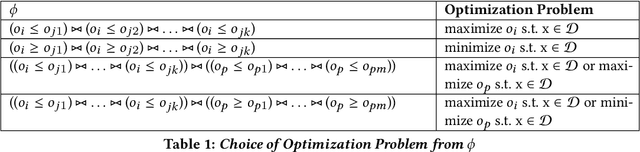
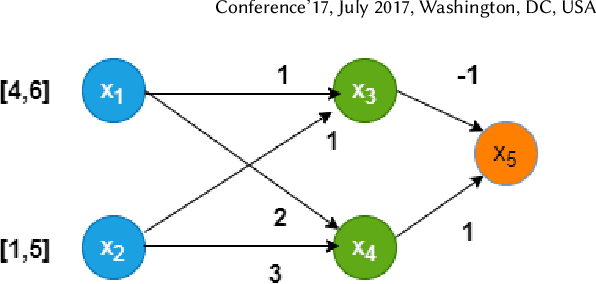
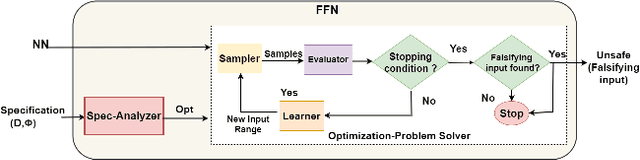
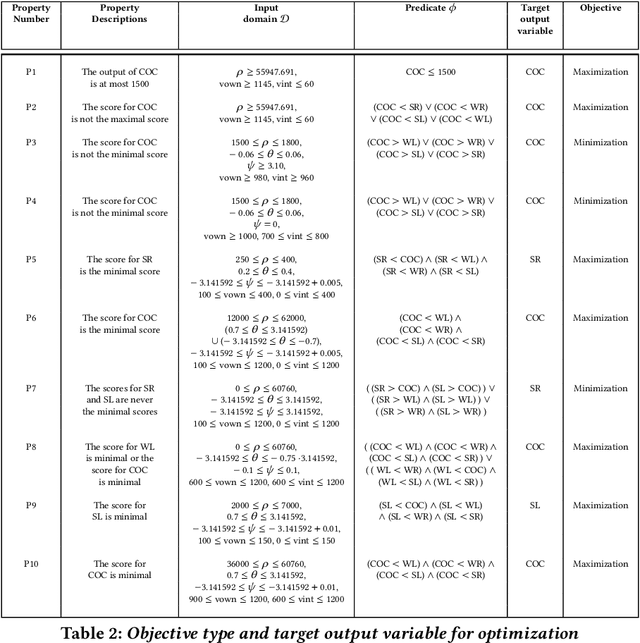
Neural networks are now extensively used in perception, prediction and control of autonomous systems. Their deployment in safety-critical systems brings forth the need for verification techniques for such networks. As an alternative to exhaustive and costly verification algorithms, lightweight falsification algorithms have been heavily used to search for an input to the system that produces an unsafe output, i.e., a counterexample to the safety of the system. In this work, we propose a falsification algorithm for neural networks that directs the search for a counterexample, guided by a safety property specification. Our algorithm uses a derivative-free sampling-based optimization method. We evaluate our algorithm on 45 trained neural network benchmarks of the ACAS Xu system against 10 safety properties. We show that our falsification procedure detects all the unsafe instances that other verification tools also report as unsafe. Moreover, in terms of performance, our falsification procedure identifies most of the unsafe instances faster, in comparison to the state-of-the-art verification tools for feed-forward neural networks such as NNENUM and Neurify and in many instances, by orders of magnitude.