 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstraint Manifold Exploration for Efficient Continuous Coverage Estimation
Feb 06, 2026Many automated manufacturing processes rely on industrial robot arms to move process-specific tools along workpiece surfaces. In applications like grinding, sanding, spray painting, or inspection, they need to cover a workpiece fully while keeping their tools perpendicular to its surface. While there are approaches to generate trajectories for these applications, there are no sufficient methods for analyzing the feasibility of full surface coverage. This work proposes a sampling-based approach for continuous coverage estimation that explores reachable surface regions in the configuration space. We define an extended ambient configuration space that allows for the representation of tool position and orientation constraints. A continuation-based approach is used to explore it using two different sampling strategies. A thorough evaluation across different kinematics and environments analyzes their runtime and efficiency. This validates our ability to accurately and efficiently calculate surface coverage for complex surfaces in complicated environments.
MOSAIC: Modular Scalable Autonomy for Intelligent Coordination of Heterogeneous Robotic Teams
Jan 30, 2026Mobile robots have become indispensable for exploring hostile environments, such as in space or disaster relief scenarios, but often remain limited to teleoperation by a human operator. This restricts the deployment scale and requires near-continuous low-latency communication between the operator and the robot. We present MOSAIC: a scalable autonomy framework for multi-robot scientific exploration using a unified mission abstraction based on Points of Interest (POIs) and multiple layers of autonomy, enabling supervision by a single operator. The framework dynamically allocates exploration and measurement tasks based on each robot's capabilities, leveraging team-level redundancy and specialization to enable continuous operation. We validated the framework in a space-analog field experiment emulating a lunar prospecting scenario, involving a heterogeneous team of five robots and a single operator. Despite the complete failure of one robot during the mission, the team completed 82.3% of assigned tasks at an Autonomy Ratio of 86%, while the operator workload remained at only 78.2%. These results demonstrate that the proposed framework enables robust, scalable multi-robot scientific exploration with limited operator intervention. We further derive practical lessons learned in robot interoperability, networking architecture, team composition, and operator workload management to inform future multi-robot exploration missions.
A Practical Framework of Key Performance Indicators for Multi-Robot Lunar and Planetary Field Tests
Jan 28, 2026Robotic prospecting for critical resources on the Moon, such as ilmenite, rare earth elements, and water ice, requires robust exploration methods given the diverse terrain and harsh environmental conditions. Although numerous analog field trials address these goals, comparing their results remains challenging because of differences in robot platforms and experimental setups. These missions typically assess performance using selected, scenario-specific engineering metrics that fail to establish a clear link between field performance and science-driven objectives. In this paper, we address this gap by deriving a structured framework of KPI from three realistic multi-robot lunar scenarios reflecting scientific objectives and operational constraints. Our framework emphasizes scenario-dependent priorities in efficiency, robustness, and precision, and is explicitly designed for practical applicability in field deployments. We validated the framework in a multi-robot field test and found it practical and easy to apply for efficiency- and robustness-related KPI, whereas precision-oriented KPI require reliable ground-truth data that is not always feasible to obtain in outdoor analog environments. Overall, we propose this framework as a common evaluation standard enabling consistent, goal-oriented comparison of multi-robot field trials and supporting systematic development of robotic systems for future planetary exploration.
Behavior Tree Capabilities for Dynamic Multi-Robot Task Allocation with Heterogeneous Robot Teams
Feb 05, 2024



While individual robots are becoming increasingly capable, with new sensors and actuators, the complexity of expected missions increased exponentially in comparison. To cope with this complexity, heterogeneous teams of robots have become a significant research interest in recent years. Making effective use of the robots and their unique skills in a team is challenging. Dynamic runtime conditions often make static task allocations infeasible, therefore requiring a dynamic, capability-aware allocation of tasks to team members. To this end, we propose and implement a system that allows a user to specify missions using Bheavior Trees (BTs), which can then, at runtime, be dynamically allocated to the current robot team. The system allows to statically model an individual robot's capabilities within our ros_bt_py BT framework. It offers a runtime auction system to dynamically allocate tasks to the most capable robot in the current team. The system leverages utility values and pre-conditions to ensure that the allocation improves the overall mission execution quality while preventing faulty assignments. To evaluate the system, we simulated a find-and-decontaminate mission with a team of three heterogeneous robots and analyzed the utilization and overall mission times as metrics. Our results show that our system can improve the overall effectiveness of a team while allowing for intuitive mission specification and flexibility in the team composition.
Efficient Gesture Recognition on Spiking Convolutional Networks Through Sensor Fusion of Event-Based and Depth Data
Jan 30, 2024



As intelligent systems become increasingly important in our daily lives, new ways of interaction are needed. Classical user interfaces pose issues for the physically impaired and are partially not practical or convenient. Gesture recognition is an alternative, but often not reactive enough when conventional cameras are used. This work proposes a Spiking Convolutional Neural Network, processing event- and depth data for gesture recognition. The network is simulated using the open-source neuromorphic computing framework LAVA for offline training and evaluation on an embedded system. For the evaluation three open source data sets are used. Since these do not represent the applied bi-modality, a new data set with synchronized event- and depth data was recorded. The results show the viability of temporal encoding on depth information and modality fusion, even on differently encoded data, to be beneficial to network performance and generalization capabilities.
EfficientPPS: Part-aware Panoptic Segmentation of Transparent Objects for Robotic Manipulation
Dec 21, 2023The use of autonomous robots for assistance tasks in hospitals has the potential to free up qualified staff and im-prove patient care. However, the ubiquity of deformable and transparent objects in hospital settings poses signif-icant challenges to vision-based perception systems. We present EfficientPPS, a neural architecture for part-aware panoptic segmentation that provides robots with semantically rich visual information for grasping and ma-nipulation tasks. We also present an unsupervised data collection and labelling method to reduce the need for human involvement in the training process. EfficientPPS is evaluated on a dataset containing real-world hospital objects and demonstrated to be robust and efficient in grasping transparent transfusion bags with a collaborative robot arm.
* 8 pages, 8 figures, presented at the 56th International Symposium on Robotics (ISR Europe)
HoLLiE C -- A Multifunctional Bimanual Mobile Robot Supporting Versatile Care Applications
Dec 11, 2023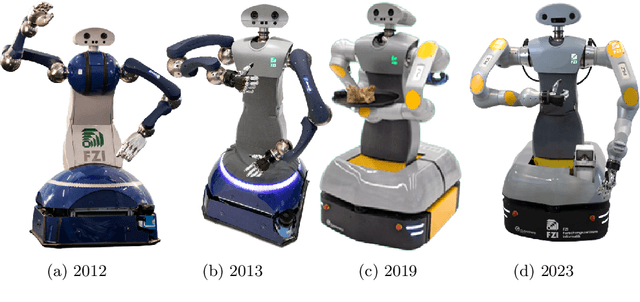

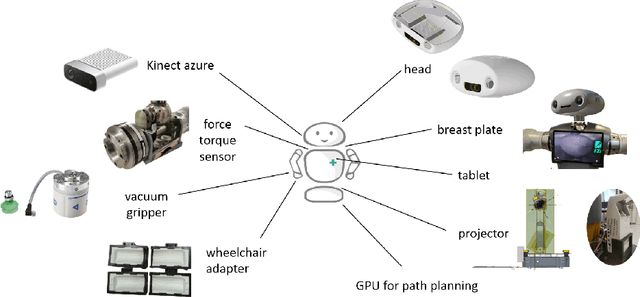
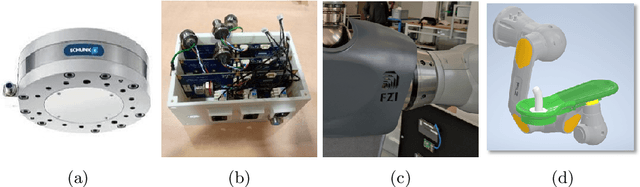
Care robotics as a research field has developed a lot in recent years, driven by the rapidly increasing need for it. However, these technologies are mostly limited to a very concrete and usually relatively simple use case. The bimanual robot House of Living Labs intelligent Escort (HoLLiE) includes an omnidirectional mobile platform. This paper presents how HoLLiE is adapted, by flexible software and hardware modules, for different care applications. The design goal of HoLLiE was to be human-like but abstract enough to ensure a high level of acceptance, which is very advantageous for its use in hospitals. After a short retrospect of previous generations of HoLLiE, it is highlighted how the current version is equipped with a variety of additional sensors and actuators to allow a wide range of possible applications. Then, the software stack of HoLLiE is depicted, with the focus on navigation and force sensitive intention recognition.
Distributed Behavior Trees for Heterogeneous Robot Teams
Sep 15, 2023



Heterogeneous Robot Teams can provide a wide range of capabilities and therefore significant benefits when handling a mission. However, they also require new approaches to capability and mission definition that are not only suitable to handle heterogeneous capabilities but furthermore allow a combination or distribution of them with a coherent representation that is not limiting the individual robot. Behavior Trees offer many of the required properties, are growing in popularity for robot control and have been proposed for multirobot coordination, but always as separate behavior tree, defined in advance and without consideration for a changing team. In this paper, we propose a new behavior tree approach that is capable to handle complex real world robotic missions and is geared towards a distributed execution by providing built in functionalities for cost calculation, subtree distribution and data wiring. We present a formal definition, its open source implementation as ros_bt_py library and experimental verification of its capabilities.
Learning Human-Inspired Force Strategies for Robotic Assembly
Mar 22, 2023



The programming of robotic assembly tasks is a key component in manufacturing and automation. Force-sensitive assembly, however, often requires reactive strategies to handle slight changes in positioning and unforeseen part jamming. Learning such strategies from human performance is a promising approach, but faces two common challenges: the handling of low part clearances which is difficult to capture from demonstrations and learning intuitive strategies offline without access to the real hardware. We address these two challenges by learning probabilistic force strategies from data that are easily acquired offline in a robot-less simulation from human demonstrations with a joystick. We combine a Long Short Term Memory (LSTM) and a Mixture Density Network (MDN) to model human-inspired behavior in such a way that the learned strategies transfer easily onto real hardware. The experiments show a UR10e robot that completes a plastic assembly with clearances of less than 100 micrometers whose strategies were solely demonstrated in simulation.
Implicit Shape Model Trees: Recognition of 3-D Indoor Scenes and Prediction of Object Poses for Mobile Robots
Jan 25, 2023



For a mobile robot, we present an approach to recognize scenes in arrangements of objects distributed over cluttered environments. Recognition is made possible by letting the robot alternately search for objects and assign found objects to scenes. Our scene model "Implicit Shape Model (ISM) trees" allows us to solve these two tasks together. For the ISM trees, this article presents novel algorithms for recognizing scenes and predicting the poses of searched objects. We define scenes as sets of objects, where some objects are connected by 3-D spatial relations. In previous work, we recognized scenes using single ISMs. However, these ISMs were prone to false positives. To address this problem, we introduced ISM trees, a hierarchical model that includes multiple ISMs. Through the recognition algorithm it contributes, this article ultimately enables the use of ISM trees in scene recognition. We intend to enable users to generate ISM trees from object arrangements demonstrated by humans. The lack of a suitable algorithm is overcome by the introduction of an ISM tree generation algorithm. In scene recognition, it is usually assumed that image data is already available. However, this is not always the case for robots. For this reason, we combined scene recognition and object search in previous work. However, we did not provide an efficient algorithm to link the two tasks. This article introduces such an algorithm that predicts the poses of searched objects with relations. Experiments show that our overall approach enables robots to find and recognize object arrangements that cannot be perceived from a single viewpoint.