 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Human-Inspired Force Strategies for Robotic Assembly
Mar 22, 2023



The programming of robotic assembly tasks is a key component in manufacturing and automation. Force-sensitive assembly, however, often requires reactive strategies to handle slight changes in positioning and unforeseen part jamming. Learning such strategies from human performance is a promising approach, but faces two common challenges: the handling of low part clearances which is difficult to capture from demonstrations and learning intuitive strategies offline without access to the real hardware. We address these two challenges by learning probabilistic force strategies from data that are easily acquired offline in a robot-less simulation from human demonstrations with a joystick. We combine a Long Short Term Memory (LSTM) and a Mixture Density Network (MDN) to model human-inspired behavior in such a way that the learned strategies transfer easily onto real hardware. The experiments show a UR10e robot that completes a plastic assembly with clearances of less than 100 micrometers whose strategies were solely demonstrated in simulation.
A Walking Space Robot for On-Orbit Satellite Servicing: The ReCoBot
Mar 19, 2022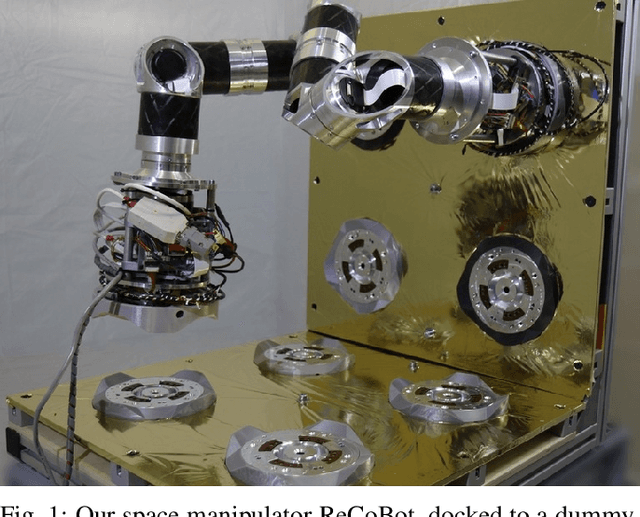
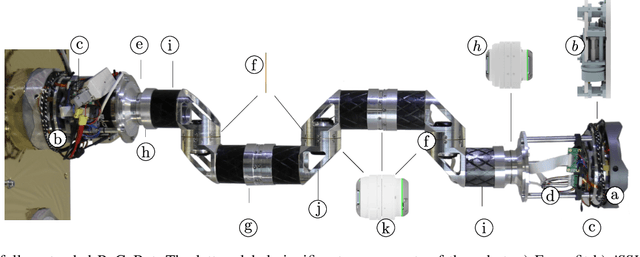
A key factor in the economic efficiency of satellites is their availability in orbit. Replacing standardized building blocks, such as empty fuel tanks or outdated electronic modules, could greatly extend the satellites' lifetime. This, however, requires flexible robots that can locomote on the surface of these satellites for optimal accessibility and manipulation. This paper introduces ReCoBot, a 7-axis walking space manipulator for locomotion and manipulation. The robot can connect to compatible structures with its symmetric ends and provides interfaces for manual teleoperation and motion planning with a constantly changing base and tip. We build on open-source robotics software and easily available components to evaluate the overall concept with an early stage demonstrator. The proposed manipulator has a length of 1.20 m and a weight of 10.4 kg and successfully locomotes over a satellite mockup in our lab environment.
A practical DMPs Implementation for Skill Creation and Teleoperation with Assistive Manipulators
Feb 18, 2022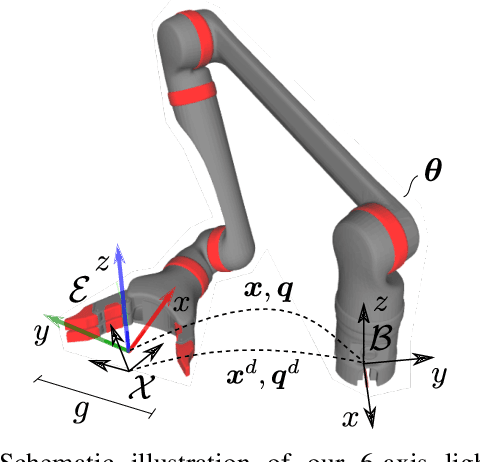
Assistive robotic manipulators are becoming increasingly important for people with disabilities. Teleoperating the manipulator in mundane tasks is part of their daily lives. Instead of steering the robot through all actions, applying self-recorded motion skills could greatly facilitate repetitive tasks. Dynamic Movement Primitives (DMP) are a powerful method for skill learning. For this use case, however, they need a simple heuristic to specify where to start and stop a skill without additional sensors. This paper provides the concept of local, global, and hybrid skills that form a modular basis for composing single-handed tasks with ease. A focus is on presenting the necessary mathematical details to support custom implementations with assistive robot arms. Experiments validate the developed methods for scratching an itchy spot, sorting objects on a desk, and feeding a piggy bank with coins. The paper is accompanied by an open-source implementation at https://github.com/fzi-forschungszentrum-informatik/ArNe
Virtual Forward Dynamics Models for Cartesian Robot Control
Sep 24, 2020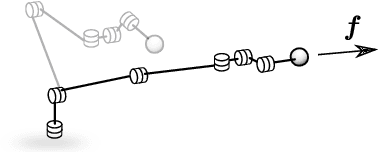
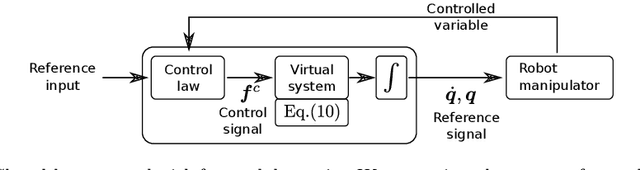
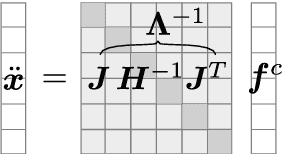

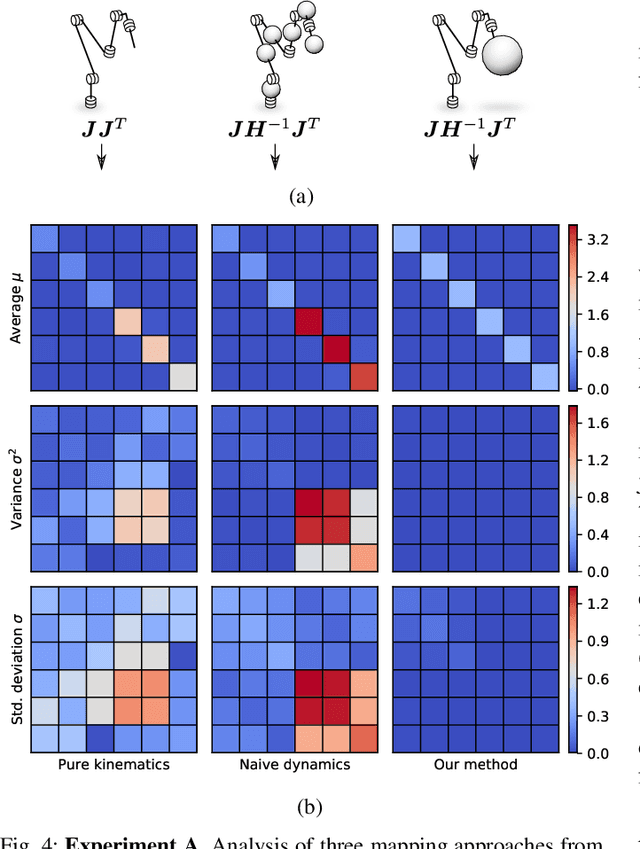
In industrial context, admittance control represents an important scheme in programming robots for interaction tasks with their environments. Those robots usually implement high-gain disturbance rejection on joint-level and hide direct access to the actuators behind velocity or position controlled interfaces. Using wrist force-torque sensors to add compliance to these systems, force-resolved control laws must map the control signals from Cartesian space to joint motion. Although forward dynamics algorithms would perfectly fit to that task description, their application to Cartesian robot control is not well researched. This paper proposes a general concept of virtual forward dynamics models for Cartesian robot control and investigates how the forward mapping behaves in comparison to well-established alternatives. Through decreasing the virtual system's link masses in comparison to the end effector, the virtual system becomes linear in the operational space dynamics. Experiments focus on stability and manipulability, particularly in singular configurations. Our results show that through this trick, forward dynamics can combine both benefits of the Jacobian inverse and the Jacobian transpose and, in this regard, outperforms the Damped Least Squares method.
Contact Skill Imitation Learning for Robot-Independent Assembly Programming
Aug 17, 2019


Robotic automation is a key driver for the advancement of technology. The skills of human workers, however, are difficult to program and seem currently unmatched by technical systems. In this work we present a data-driven approach to extract and learn robot-independent contact skills from human demonstrations in simulation environments, using a Long Short Term Memory (LSTM) network. Our model learns to generate error-correcting sequences of forces and torques in task space from object-relative motion, which industrial robots carry out through a Cartesian force control scheme on the real setup. This scheme uses forward dynamics computation of a virtually conditioned twin of the manipulator to solve the inverse kinematics problem. We evaluate our methods with an assembly experiment, in which our algorithm handles part tilting and jamming in order to succeed. The results show that the skill is robust towards localization uncertainty in task space and across different joint configurations of the robot. With our approach, non-experts can easily program force-sensitive assembly tasks in a robot-independent way.
Inverse Kinematics with Forward Dynamics Solvers for Sampled Motion Tracking
Aug 17, 2019

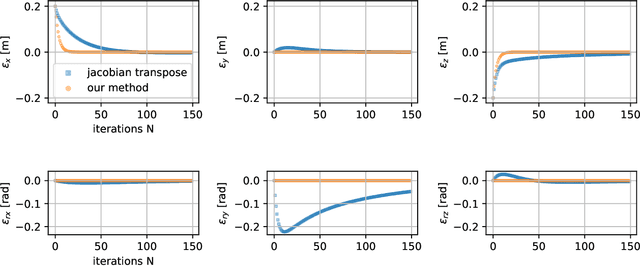
Tracking Cartesian trajectories with end-effectors is a fundamental task in robot control. For motion that is not known a priori, the solvers must find fast solutions to the inverse kinematics (IK) problem for discretely sampled target poses. On joint control level, however, the robot's actuators operate in a continuous domain, requiring smooth transitions between individual states. In this work we present a boost to the well-known Jacobian transpose method to address this goal, using the mass matrix of a virtually conditioned twin of the manipulator. Results on the UR10 show superior convergence and quality of our dynamics-based solver against the plain Jacobian method. Our algorithm is straightforward to implement as a controller, using present robotics libraries.