 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Walking Space Robot for On-Orbit Satellite Servicing: The ReCoBot
Paper and Code
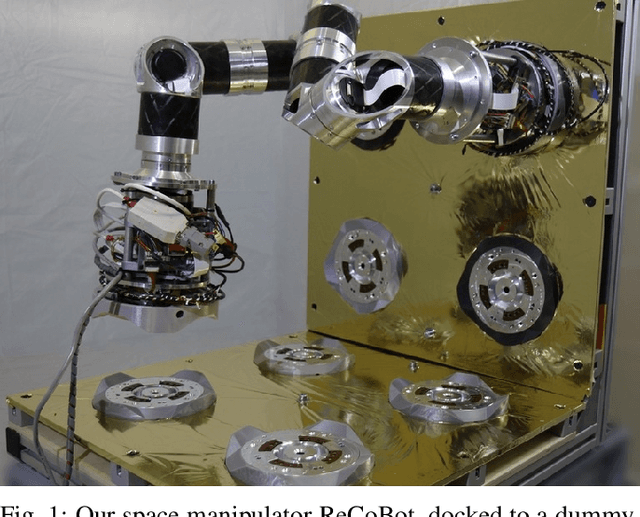
A key factor in the economic efficiency of satellites is their availability in orbit. Replacing standardized building blocks, such as empty fuel tanks or outdated electronic modules, could greatly extend the satellites' lifetime. This, however, requires flexible robots that can locomote on the surface of these satellites for optimal accessibility and manipulation. This paper introduces ReCoBot, a 7-axis walking space manipulator for locomotion and manipulation. The robot can connect to compatible structures with its symmetric ends and provides interfaces for manual teleoperation and motion planning with a constantly changing base and tip. We build on open-source robotics software and easily available components to evaluate the overall concept with an early stage demonstrator. The proposed manipulator has a length of 1.20 m and a weight of 10.4 kg and successfully locomotes over a satellite mockup in our lab environment.