 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHoLLiE C -- A Multifunctional Bimanual Mobile Robot Supporting Versatile Care Applications
Dec 11, 2023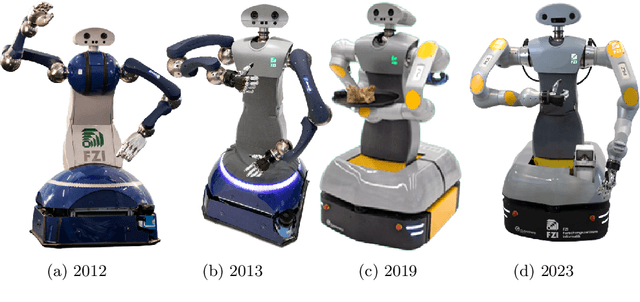

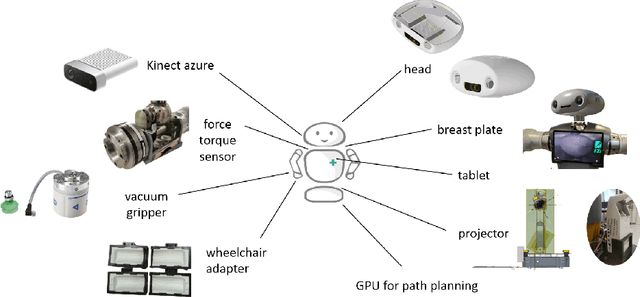
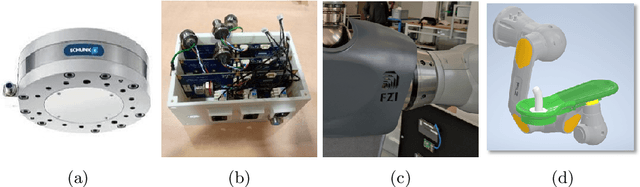
Care robotics as a research field has developed a lot in recent years, driven by the rapidly increasing need for it. However, these technologies are mostly limited to a very concrete and usually relatively simple use case. The bimanual robot House of Living Labs intelligent Escort (HoLLiE) includes an omnidirectional mobile platform. This paper presents how HoLLiE is adapted, by flexible software and hardware modules, for different care applications. The design goal of HoLLiE was to be human-like but abstract enough to ensure a high level of acceptance, which is very advantageous for its use in hospitals. After a short retrospect of previous generations of HoLLiE, it is highlighted how the current version is equipped with a variety of additional sensors and actuators to allow a wide range of possible applications. Then, the software stack of HoLLiE is depicted, with the focus on navigation and force sensitive intention recognition.