 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficientPPS: Part-aware Panoptic Segmentation of Transparent Objects for Robotic Manipulation
Dec 21, 2023The use of autonomous robots for assistance tasks in hospitals has the potential to free up qualified staff and im-prove patient care. However, the ubiquity of deformable and transparent objects in hospital settings poses signif-icant challenges to vision-based perception systems. We present EfficientPPS, a neural architecture for part-aware panoptic segmentation that provides robots with semantically rich visual information for grasping and ma-nipulation tasks. We also present an unsupervised data collection and labelling method to reduce the need for human involvement in the training process. EfficientPPS is evaluated on a dataset containing real-world hospital objects and demonstrated to be robust and efficient in grasping transparent transfusion bags with a collaborative robot arm.
* 8 pages, 8 figures, presented at the 56th International Symposium on Robotics (ISR Europe)
Domain-Specific Fine-Tuning of Large Language Models for Interactive Robot Programming
Dec 21, 2023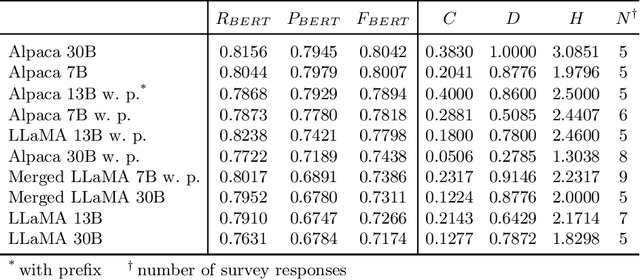
Industrial robots are applied in a widening range of industries, but robot programming mostly remains a task limited to programming experts. We propose a natural language-based assistant for programming of advanced, industrial robotic applications and investigate strategies for domain-specific fine-tuning of foundation models with limited data and compute.
HoLLiE C -- A Multifunctional Bimanual Mobile Robot Supporting Versatile Care Applications
Dec 11, 2023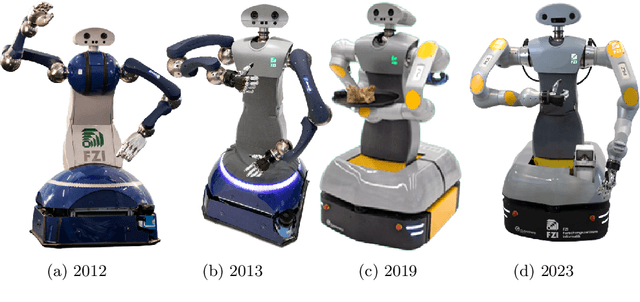

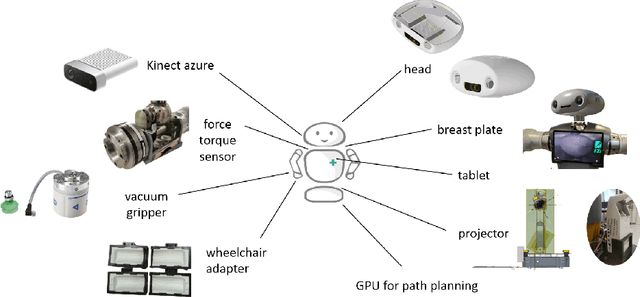
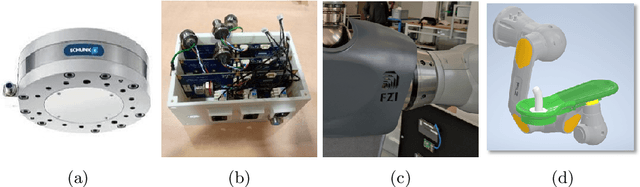
Care robotics as a research field has developed a lot in recent years, driven by the rapidly increasing need for it. However, these technologies are mostly limited to a very concrete and usually relatively simple use case. The bimanual robot House of Living Labs intelligent Escort (HoLLiE) includes an omnidirectional mobile platform. This paper presents how HoLLiE is adapted, by flexible software and hardware modules, for different care applications. The design goal of HoLLiE was to be human-like but abstract enough to ensure a high level of acceptance, which is very advantageous for its use in hospitals. After a short retrospect of previous generations of HoLLiE, it is highlighted how the current version is equipped with a variety of additional sensors and actuators to allow a wide range of possible applications. Then, the software stack of HoLLiE is depicted, with the focus on navigation and force sensitive intention recognition.
Localization and Tracking of User-Defined Points on Deformable Objects for Robotic Manipulation
May 19, 2021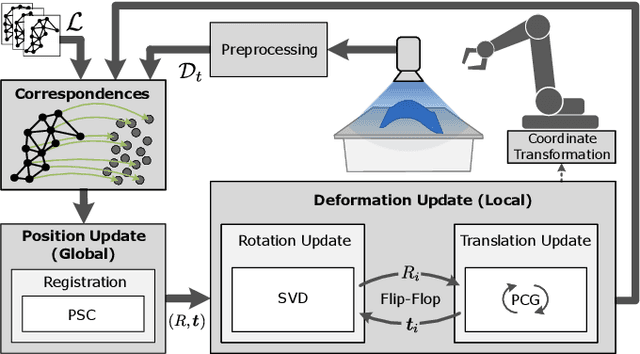
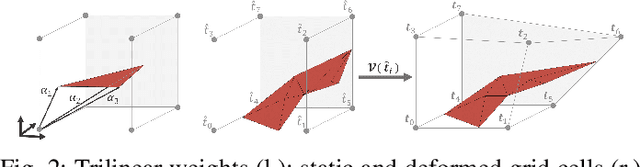
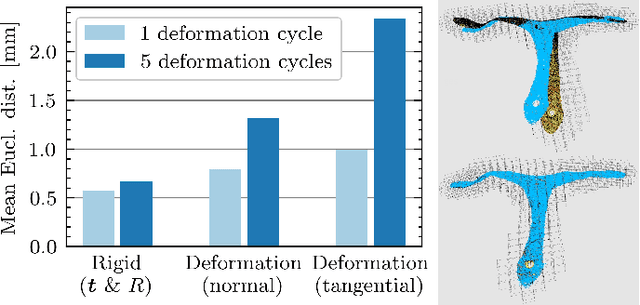
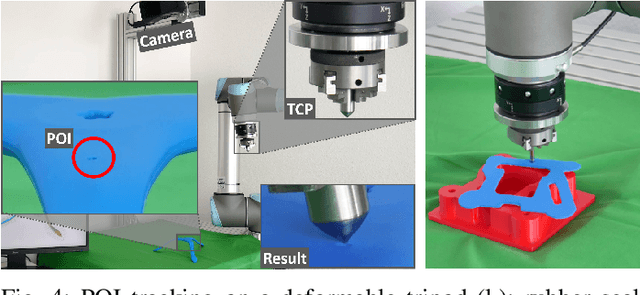
This paper introduces an efficient procedure to localize user-defined points on the surface of deformable objects and track their positions in 3D space over time. To cope with a deformable object's infinite number of DOF, we propose a discretized deformation field, which is estimated during runtime using a multi-step non-linear solver pipeline. The resulting high-dimensional energy minimization problem describes the deviation between an offline-defined reference model and a pre-processed camera image. An additional regularization term allows for assumptions about the object's hidden areas and increases the solver's numerical stability. Our approach is capable of solving the localization problem online in a data-parallel manner, making it ideally suitable for the perception of non-rigid objects in industrial manufacturing processes.