 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMilling using two mechatronically coupled robots
Apr 17, 2024Industrial robots are commonly used in various industries due to their flexibility. However, their adoption for machining tasks is minimal because of the low dynamic stiffness characteristic of serial kinematic chains. To overcome this problem, we propose coupling two industrial robots at the flanges to form a parallel kinematic machining system. Although parallel kinematic chains are inherently stiffer, one possible disadvantage of the proposed system is that it is heavily overactuated. We perform a modal analysis to show that this may be an advantage, as the redundant degrees of freedom can be used to shift the natural frequencies by applying tension to the coupling module. To demonstrate the validity of our approach, we perform a milling experiment using our coupled system. An external measurement system is used to show that tensioning the coupling module causes a deformation of the system. We further show that this deformation is static over the tool path and can be compensated for.
A review of systematic selection of clustering algorithms and their evaluation
Jun 24, 2021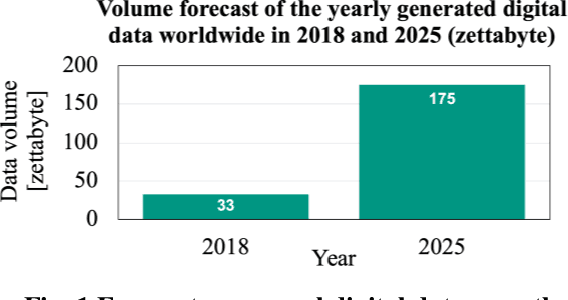
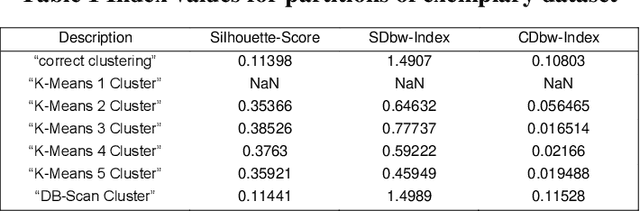

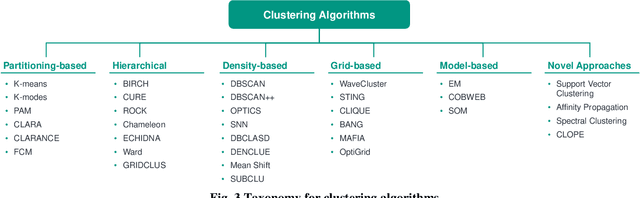
Data analysis plays an indispensable role for value creation in industry. Cluster analysis in this context is able to explore given datasets with little or no prior knowledge and to identify unknown patterns. As (big) data complexity increases in the dimensions volume, variety, and velocity, this becomes even more important. Many tools for cluster analysis have been developed from early on and the variety of different clustering algorithms is huge. As the selection of the right clustering procedure is crucial to the results of the data analysis, users are in need for support on their journey of extracting knowledge from raw data. Thus, the objective of this paper lies in the identification of a systematic selection logic for clustering algorithms and corresponding validation concepts. The goal is to enable potential users to choose an algorithm that fits best to their needs and the properties of their underlying data clustering problem. Moreover, users are supported in selecting the right validation concepts to make sense of the clustering results. Based on a comprehensive literature review, this paper provides assessment criteria for clustering method evaluation and validation concept selection. The criteria are applied to several common algorithms and the selection process of an algorithm is supported by the introduction of pseudocode-based routines that consider the underlying data structure.
Localization and Tracking of User-Defined Points on Deformable Objects for Robotic Manipulation
May 19, 2021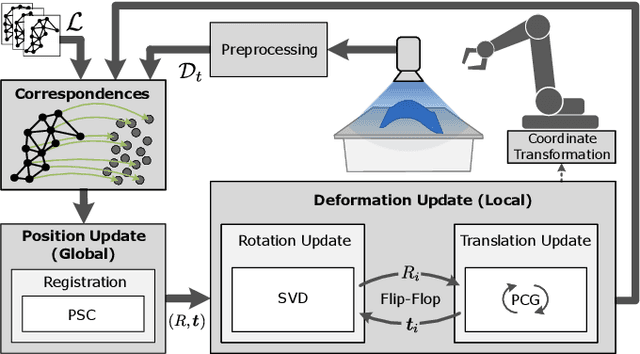
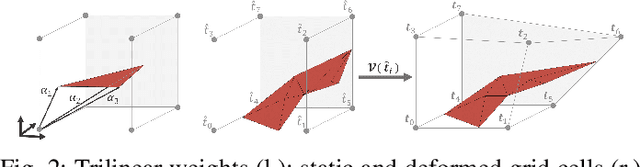
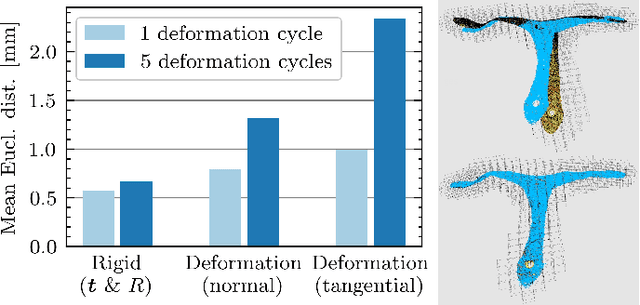
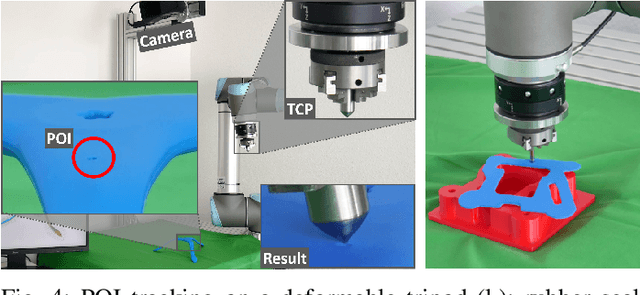
This paper introduces an efficient procedure to localize user-defined points on the surface of deformable objects and track their positions in 3D space over time. To cope with a deformable object's infinite number of DOF, we propose a discretized deformation field, which is estimated during runtime using a multi-step non-linear solver pipeline. The resulting high-dimensional energy minimization problem describes the deviation between an offline-defined reference model and a pre-processed camera image. An additional regularization term allows for assumptions about the object's hidden areas and increases the solver's numerical stability. Our approach is capable of solving the localization problem online in a data-parallel manner, making it ideally suitable for the perception of non-rigid objects in industrial manufacturing processes.
Siamese Basis Function Networks for Defect Classification
Dec 09, 2020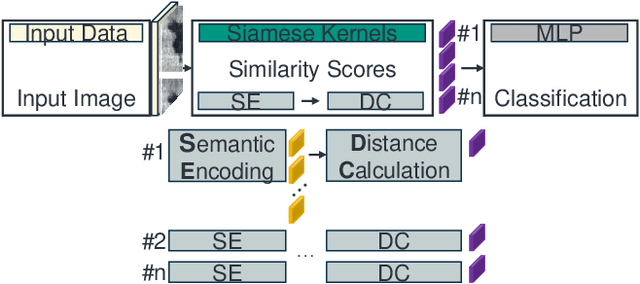
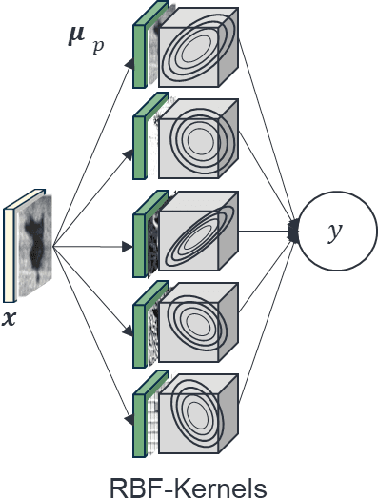
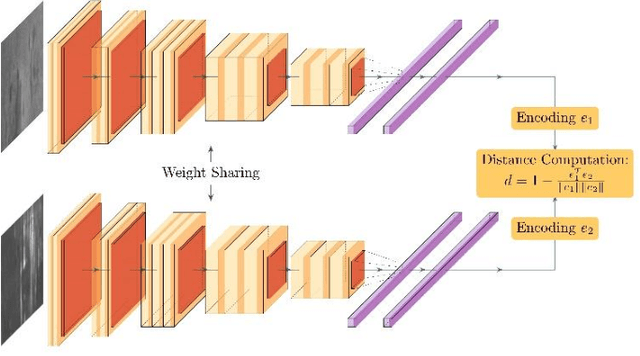
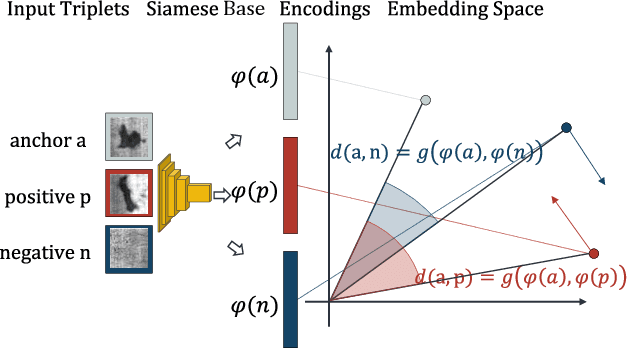
Defect classification on metallic surfaces is considered a critical issue since substantial quantities of steel and other metals are processed by the manufacturing industry on a daily basis. The authors propose a new approach where they introduce the usage of so called Siamese Kernels in a Basis Function Network to create the Siamese Basis Function Network (SBF-Network). The underlying idea is to classify by comparison using similarity scores. This classification is reinforced through efficient deep learning based feature extraction methods. First, a center image is assigned to each Siamese Kernel. The Kernels are then trained to generate encodings in a way that enables them to distinguish their center from other images in the dataset. Using this approach the authors created some kind of class-awareness inside the Siamese Kernels. To classify a given image, each Siamese Kernel generates a feature vector for its center as well as the given image. These vectors represent encodings of the respective images in a lower-dimensional space. The distance between each pair of encodings is then computed using the cosine distance together with radial basis functions. The distances are fed into a multilayer neural network to perform the classification. With this approach the authors achieved outstanding results on the state of the art NEU surface defect dataset.
GAN based ball screw drive picture database enlargement for failure classification
Nov 20, 2020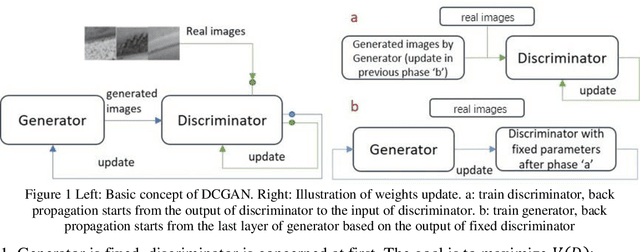

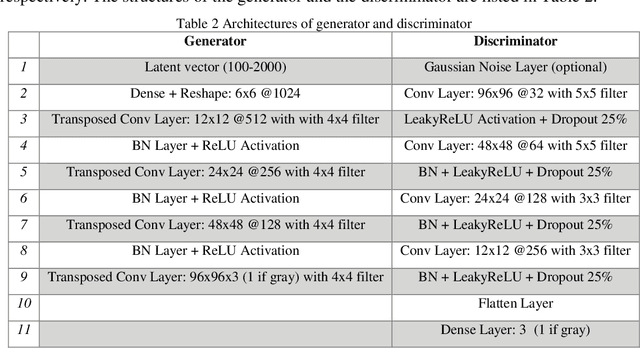
The lack of reliable large datasets is one of the biggest difficulties of using modern machine learning methods in the field of failure detection in the manufacturing industry. In order to develop the function of failure classification for ball screw surface, sufficient image data of surface failures is necessary. When training a neural network model based on a small dataset, the trained model may lack the generalization ability and may perform poorly in practice. The main goal of this paper is to generate synthetic images based on the generative adversarial network (GAN) to enlarge the image dataset of ball screw surface failures. Pitting failure and rust failure are two possible failure types on ball screw surface chosen in this paper to represent the surface failure classes. The quality and diversity of generated images are evaluated afterwards using qualitative methods including expert observation, t-SNE visualization and the quantitative method of FID score. To verify whether the GAN based generated images can increase failure classification performance, the real image dataset was augmented and replaced by GAN based generated images to do the classification task. The authors successfully created GAN based images of ball screw surface failures which showed positive effect on classification test performance.
Context-based Image Segment Labeling (CBISL)
Nov 02, 2020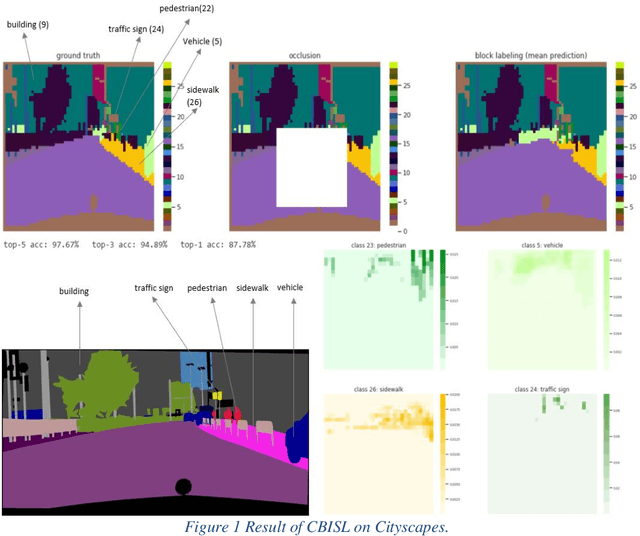
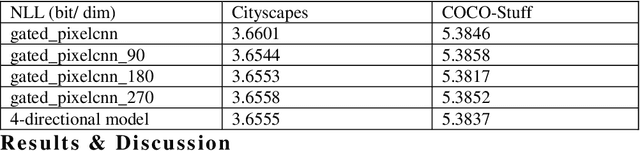
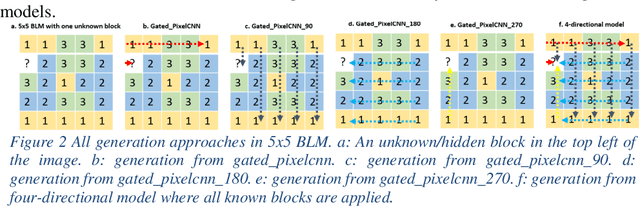
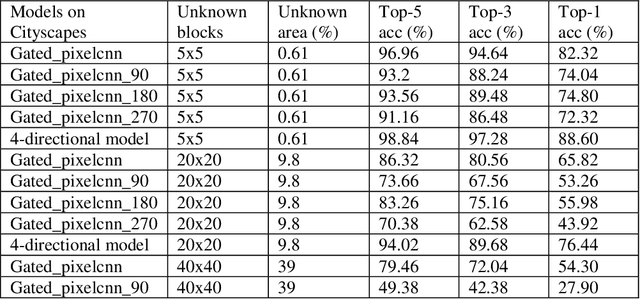
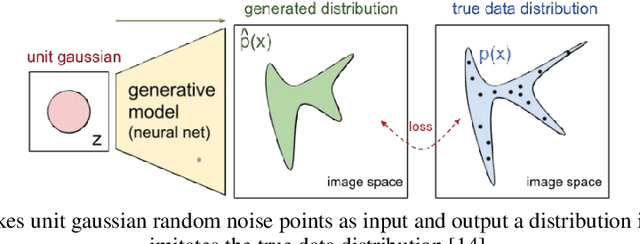
Working with images, one often faces problems with incomplete or unclear information. Image inpainting can be used to restore missing image regions but focuses, however, on low-level image features such as pixel intensity, pixel gradient orientation, and color. This paper aims to recover semantic image features (objects and positions) in images. Based on published gated PixelCNNs, we demonstrate a new approach referred to as quadro-directional PixelCNN to recover missing objects and return probable positions for objects based on the context. We call this approach context-based image segment labeling (CBISL). The results suggest that our four-directional model outperforms one-directional models (gated PixelCNN) and returns a human-comparable performance.