 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCleaning Robots in Public Spaces: A Survey and Proposal for Benchmarking Based on Stakeholders Interviews
Jul 23, 2024Autonomous cleaning robots for public spaces have potential for addressing current societal challenges, such as labor shortages and cleanliness in public spaces. Other application domains like autonomous driving, bin picking, or search and rescue have shown that benchmarking platforms and approaches in competitive settings can advance their respective research fields, resulting in more applicable systems under real-world conditions. For this paper, we analyzed seven semi-structured, qualitative stakeholder interviews about outdoor cleaning, identified current needs as well as limitations, and considered those results for the development of a benchmarking scenario based on the previous observations.
Efficient Gesture Recognition on Spiking Convolutional Networks Through Sensor Fusion of Event-Based and Depth Data
Jan 30, 2024



As intelligent systems become increasingly important in our daily lives, new ways of interaction are needed. Classical user interfaces pose issues for the physically impaired and are partially not practical or convenient. Gesture recognition is an alternative, but often not reactive enough when conventional cameras are used. This work proposes a Spiking Convolutional Neural Network, processing event- and depth data for gesture recognition. The network is simulated using the open-source neuromorphic computing framework LAVA for offline training and evaluation on an embedded system. For the evaluation three open source data sets are used. Since these do not represent the applied bi-modality, a new data set with synchronized event- and depth data was recorded. The results show the viability of temporal encoding on depth information and modality fusion, even on differently encoded data, to be beneficial to network performance and generalization capabilities.
HoLLiE C -- A Multifunctional Bimanual Mobile Robot Supporting Versatile Care Applications
Dec 11, 2023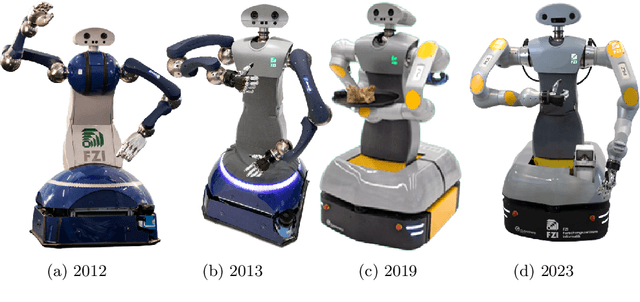

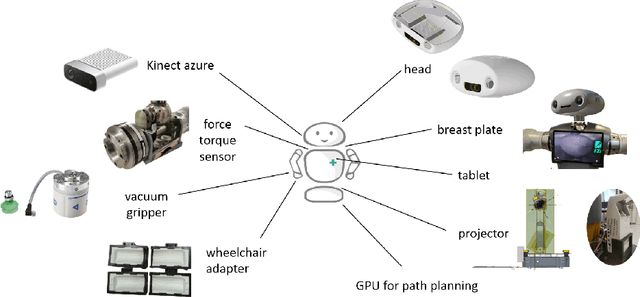
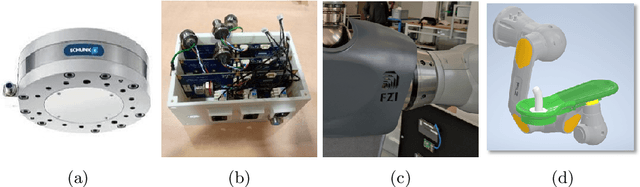
Care robotics as a research field has developed a lot in recent years, driven by the rapidly increasing need for it. However, these technologies are mostly limited to a very concrete and usually relatively simple use case. The bimanual robot House of Living Labs intelligent Escort (HoLLiE) includes an omnidirectional mobile platform. This paper presents how HoLLiE is adapted, by flexible software and hardware modules, for different care applications. The design goal of HoLLiE was to be human-like but abstract enough to ensure a high level of acceptance, which is very advantageous for its use in hospitals. After a short retrospect of previous generations of HoLLiE, it is highlighted how the current version is equipped with a variety of additional sensors and actuators to allow a wide range of possible applications. Then, the software stack of HoLLiE is depicted, with the focus on navigation and force sensitive intention recognition.
Reactive Neural Path Planning with Dynamic Obstacle Avoidance in a Condensed Configuration Space
Jul 08, 2022

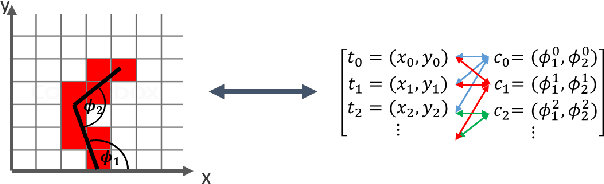
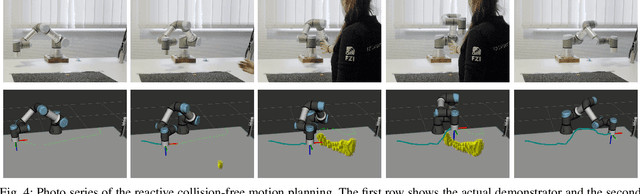
We present a biologically inspired approach for path planning with dynamic obstacle avoidance. Path planning is performed in a condensed configuration space of a robot generated by self-organizing neural networks (SONN). The robot itself and static as well as dynamic obstacles are mapped from the Cartesian task space into the configuration space by precomputed kinematics. The condensed space represents a cognitive map of the environment, which is inspired by place cells and the concept of cognitive maps in mammalian brains. The generation of training data as well as the evaluation were performed on a real industrial robot accompanied by simulations. To evaluate the reactive collision-free online planning within a changing environment, a demonstrator was realized. Then, a comparative study regarding sample-based planners was carried out. So we could show that the robot is able to operate in dynamically changing environments and re-plan its motion trajectories within impressing 0.02 seconds, which proofs the real-time capability of our concept.
Comparing SONN Types for Efficient Robot Motion Planning in the Configuration Space
Mar 18, 2022

Motion planning in the configuration space (C-space) induces benefits, such as smooth trajectories. It becomes more complex as the degrees of freedom (DOF) increase. This is due to the direct relation between the dimensionality of the search space and the DOF. Self-organizing neural networks (SONN) and their famous candidate, the Self-Organizing Map, have been proven to be useful tools for C-space reduction while preserving its underlying topology, as presented in [29]. In this work, we extend our previous study with additional models and adapt the approach from human motion data towards robots' kinematics. The evaluation includes the best performant models from [29] and three additional SONN architectures, representing the consequent continuation of this previous work. Generated Trajectories, planned with the different SONN models, were successfully tested in a robot simulation.