 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive Neural Path Planning with Dynamic Obstacle Avoidance in a Condensed Configuration Space
Jul 08, 2022

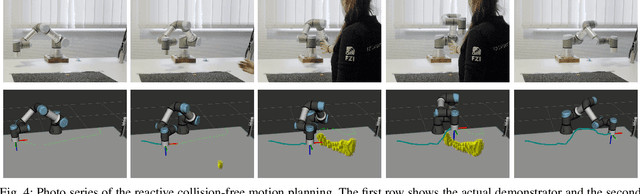
We present a biologically inspired approach for path planning with dynamic obstacle avoidance. Path planning is performed in a condensed configuration space of a robot generated by self-organizing neural networks (SONN). The robot itself and static as well as dynamic obstacles are mapped from the Cartesian task space into the configuration space by precomputed kinematics. The condensed space represents a cognitive map of the environment, which is inspired by place cells and the concept of cognitive maps in mammalian brains. The generation of training data as well as the evaluation were performed on a real industrial robot accompanied by simulations. To evaluate the reactive collision-free online planning within a changing environment, a demonstrator was realized. Then, a comparative study regarding sample-based planners was carried out. So we could show that the robot is able to operate in dynamically changing environments and re-plan its motion trajectories within impressing 0.02 seconds, which proofs the real-time capability of our concept.
Comparing SONN Types for Efficient Robot Motion Planning in the Configuration Space
Mar 18, 2022

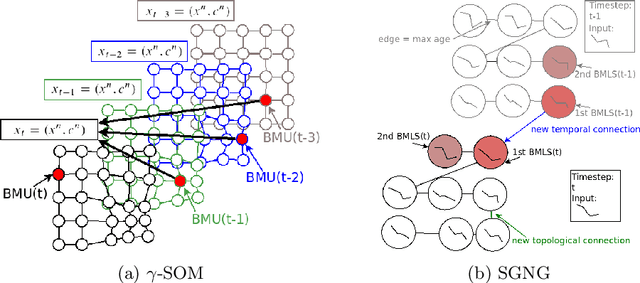
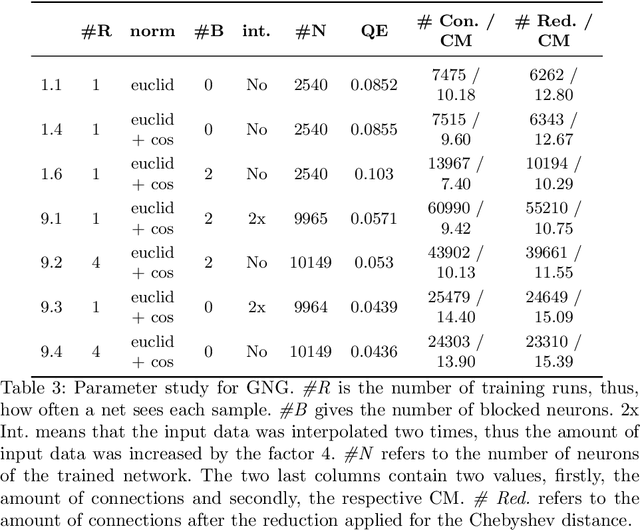
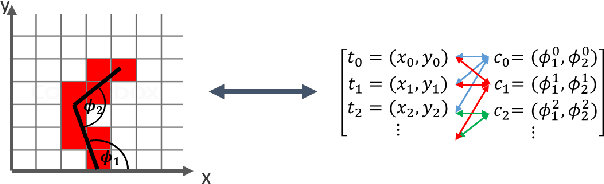
Motion planning in the configuration space (C-space) induces benefits, such as smooth trajectories. It becomes more complex as the degrees of freedom (DOF) increase. This is due to the direct relation between the dimensionality of the search space and the DOF. Self-organizing neural networks (SONN) and their famous candidate, the Self-Organizing Map, have been proven to be useful tools for C-space reduction while preserving its underlying topology, as presented in [29]. In this work, we extend our previous study with additional models and adapt the approach from human motion data towards robots' kinematics. The evaluation includes the best performant models from [29] and three additional SONN architectures, representing the consequent continuation of this previous work. Generated Trajectories, planned with the different SONN models, were successfully tested in a robot simulation.
Identification of Model Uncertainty via Optimal Design of Experiments applied to a Mechanical Press
Oct 18, 2019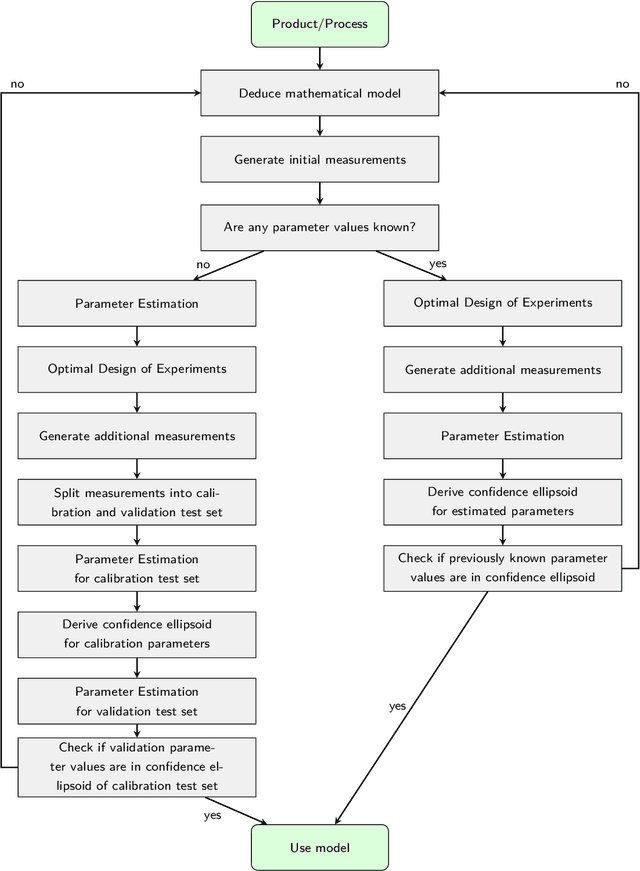
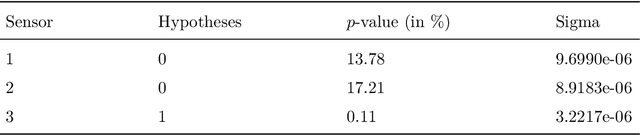
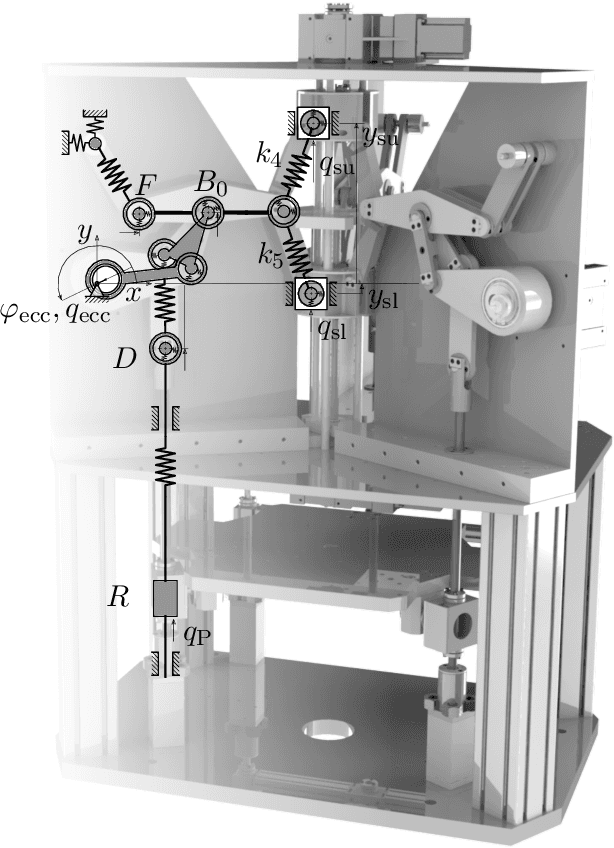
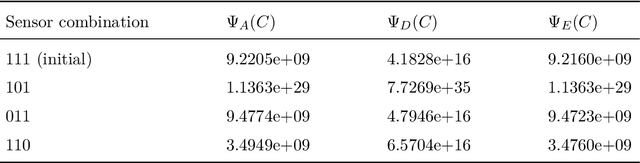
In engineering applications almost all processes are described with the aid of models. Especially forming machines heavily rely on mathematical models for control and condition monitoring. Inaccuracies during the modeling, manufacturing and assembly of these machines induce model uncertainty which impairs the controller's performance. In this paper we propose an approach to identify model uncertainty using parameter identification and optimal design of experiments. The experimental setup is characterized by optimal sensor positions such that specific model parameters can be determined with minimal variance. This allows for the computation of confidence regions, in which the real parameters or the parameter estimates from different test sets have to lie. We claim that inconsistencies in the estimated parameter values, considering their approximated confidence ellipsoids as well, cannot be explained by data or parameter uncertainty but are indicators of model uncertainty. The proposed method is demonstrated using a component of the 3D Servo Press, a multi-technology forming machine that combines spindles with eccentric servo drives.