 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLAURON VI: A Six-Legged Robot for Dynamic Walking
Aug 11, 2025



Legged locomotion enables robotic systems to traverse extremely challenging terrains. In many real-world scenarios, the terrain is not that difficult and these mixed terrain types introduce the need for flexible use of different walking strategies to achieve mission goals in a fast, reliable, and energy-efficient way. Six-legged robots have a high degree of flexibility and inherent stability that aids them in traversing even some of the most difficult terrains, such as collapsed buildings. However, their lack of fast walking gaits for easier surfaces is one reason why they are not commonly applied in these scenarios. This work presents LAURON VI, a six-legged robot platform for research on dynamic walking gaits as well as on autonomy for complex field missions. The robot's 18 series elastic joint actuators offer high-frequency interfaces for Cartesian impedance and pure torque control. We have designed, implemented, and compared three control approaches: kinematic-based, model-predictive, and reinforcement-learned controllers. The robot hardware and the different control approaches were extensively tested in a lab environment as well as on a Mars analog mission. The introduction of fast locomotion strategies for LAURON VI makes six-legged robots vastly more suitable for a wide range of real-world applications.
Behavior Tree Capabilities for Dynamic Multi-Robot Task Allocation with Heterogeneous Robot Teams
Feb 05, 2024



While individual robots are becoming increasingly capable, with new sensors and actuators, the complexity of expected missions increased exponentially in comparison. To cope with this complexity, heterogeneous teams of robots have become a significant research interest in recent years. Making effective use of the robots and their unique skills in a team is challenging. Dynamic runtime conditions often make static task allocations infeasible, therefore requiring a dynamic, capability-aware allocation of tasks to team members. To this end, we propose and implement a system that allows a user to specify missions using Bheavior Trees (BTs), which can then, at runtime, be dynamically allocated to the current robot team. The system allows to statically model an individual robot's capabilities within our ros_bt_py BT framework. It offers a runtime auction system to dynamically allocate tasks to the most capable robot in the current team. The system leverages utility values and pre-conditions to ensure that the allocation improves the overall mission execution quality while preventing faulty assignments. To evaluate the system, we simulated a find-and-decontaminate mission with a team of three heterogeneous robots and analyzed the utilization and overall mission times as metrics. Our results show that our system can improve the overall effectiveness of a team while allowing for intuitive mission specification and flexibility in the team composition.
Distributed Behavior Trees for Heterogeneous Robot Teams
Sep 15, 2023



Heterogeneous Robot Teams can provide a wide range of capabilities and therefore significant benefits when handling a mission. However, they also require new approaches to capability and mission definition that are not only suitable to handle heterogeneous capabilities but furthermore allow a combination or distribution of them with a coherent representation that is not limiting the individual robot. Behavior Trees offer many of the required properties, are growing in popularity for robot control and have been proposed for multirobot coordination, but always as separate behavior tree, defined in advance and without consideration for a changing team. In this paper, we propose a new behavior tree approach that is capable to handle complex real world robotic missions and is geared towards a distributed execution by providing built in functionalities for cost calculation, subtree distribution and data wiring. We present a formal definition, its open source implementation as ros_bt_py library and experimental verification of its capabilities.
A Model-Driven Engineering Approach for ROS using Ontological Semantics
Jan 15, 2016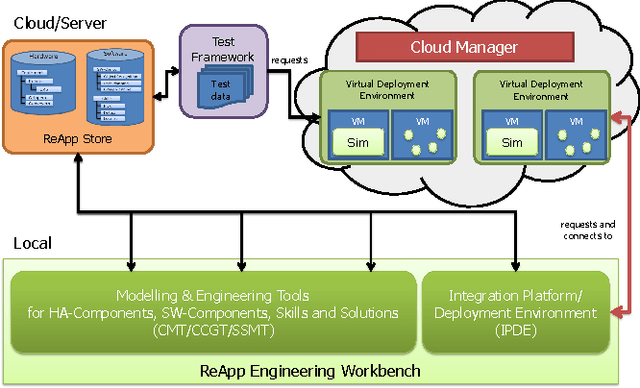
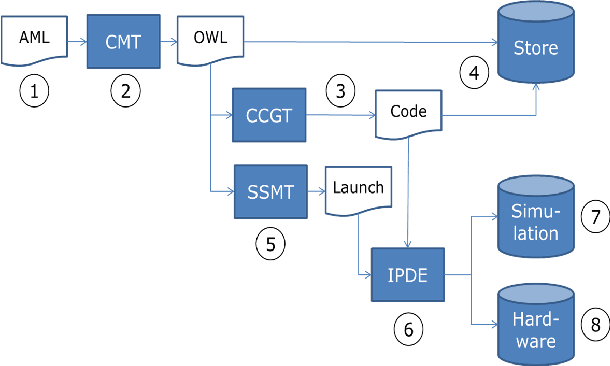
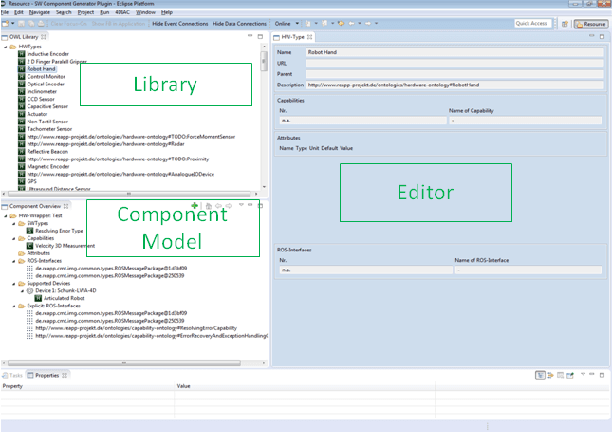
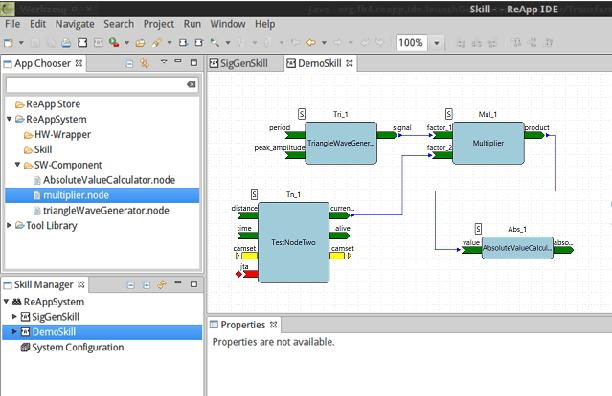
This paper presents a novel ontology-driven software engineering approach for the development of industrial robotics control software. It introduces the ReApp architecture that synthesizes model-driven engineering with semantic technologies to facilitate the development and reuse of ROS-based components and applications. In ReApp, we show how different ontological classification systems for hardware, software, and capabilities help developers in discovering suitable software components for their tasks and in applying them correctly. The proposed model-driven tooling enables developers to work at higher abstraction levels and fosters automatic code generation. It is underpinned by ontologies to minimize discontinuities in the development workflow, with an integrated development environment presenting a seamless interface to the user. First results show the viability and synergy of the selected approach when searching for or developing software with reuse in mind.