 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimplified Learning of CAD Features Leveraging a Deep Residual Autoencoder
Feb 21, 2022
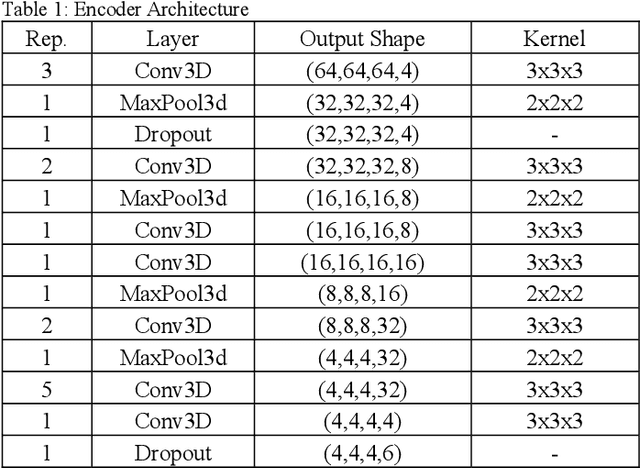
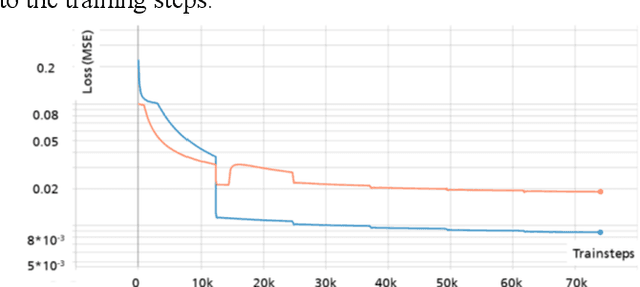
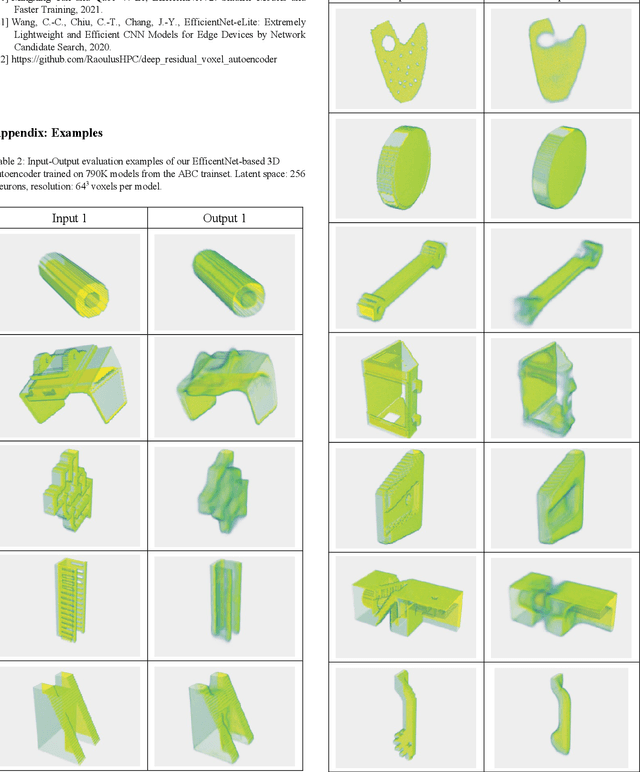
In the domain of computer vision, deep residual neural networks like EfficientNet have set new standards in terms of robustness and accuracy. One key problem underlying the training of deep neural networks is the immanent lack of a sufficient amount of training data. The problem worsens especially if labels cannot be generated automatically, but have to be annotated manually. This challenge occurs for instance if expert knowledge related to 3D parts should be externalized based on example models. One way to reduce the necessary amount of labeled data may be the use of autoencoders, which can be learned in an unsupervised fashion without labeled data. In this work, we present a deep residual 3D autoencoder based on the EfficientNet architecture, intended for transfer learning tasks related to 3D CAD model assessment. For this purpose, we adopted EfficientNet to 3D problems like voxel models derived from a STEP file. Striving to reduce the amount of labeled 3D data required, the networks encoder can be utilized for transfer training.
Feature Visualization within an Automated Design Assessment leveraging Explainable Artificial Intelligence Methods
Jan 28, 2022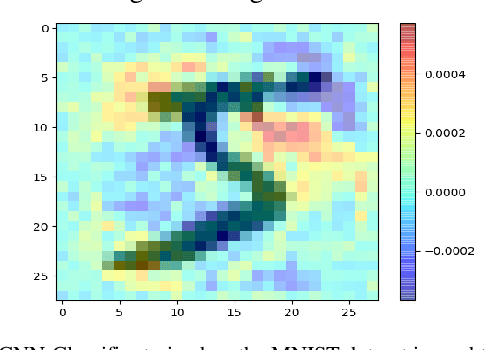
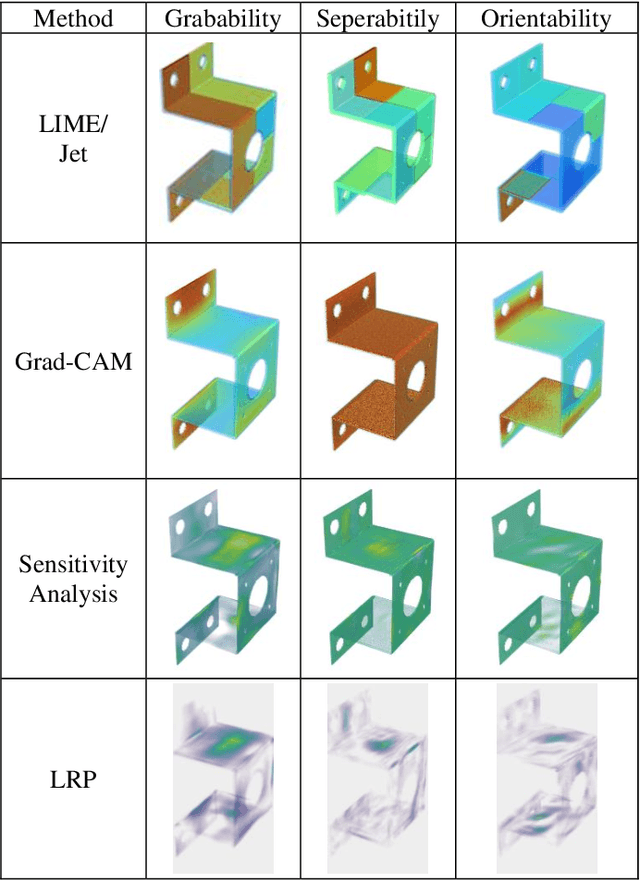
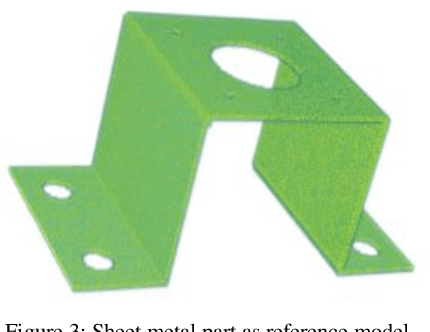
Not only automation of manufacturing processes but also automation of automation procedures itself become increasingly relevant to automation research. In this context, automated capability assessment, mainly leveraged by deep learning systems driven from 3D CAD data, have been presented. Current assessment systems may be able to assess CAD data with regards to abstract features, e.g. the ability to automatically separate components from bulk goods, or the presence of gripping surfaces. Nevertheless, they suffer from the factor of black box systems, where an assessment can be learned and generated easily, but without any geometrical indicator about the reasons of the system's decision. By utilizing explainable AI (xAI) methods, we attempt to open up the black box. Explainable AI methods have been used in order to assess whether a neural network has successfully learned a given task or to analyze which features of an input might lead to an adversarial attack. These methods aim to derive additional insights into a neural network, by analyzing patterns from a given input and its impact to the network output. Within the NeuroCAD Project, xAI methods are used to identify geometrical features which are associated with a certain abstract feature. Within this work, a sensitivity analysis (SA), the layer-wise relevance propagation (LRP), the Gradient-weighted Class Activation Mapping (Grad-CAM) method as well as the Local Interpretable Model-Agnostic Explanations (LIME) have been implemented in the NeuroCAD environment, allowing not only to assess CAD models but also to identify features which have been relevant for the network decision. In the medium run, this might enable to identify regions of interest supporting product designers to optimize their models with regards to assembly processes.
* CIRP Design 2021, 10.1016/j.procir.2021.05.075
A Model-Driven Engineering Approach for ROS using Ontological Semantics
Jan 15, 2016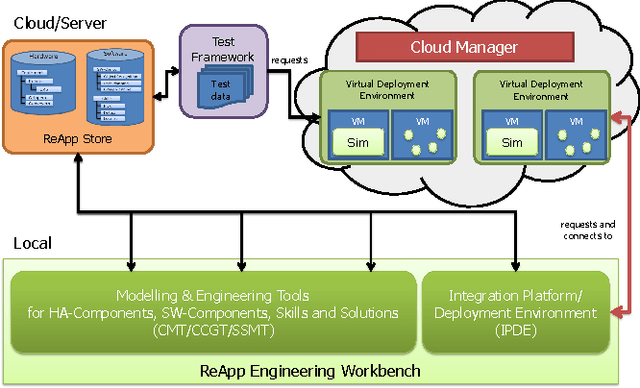
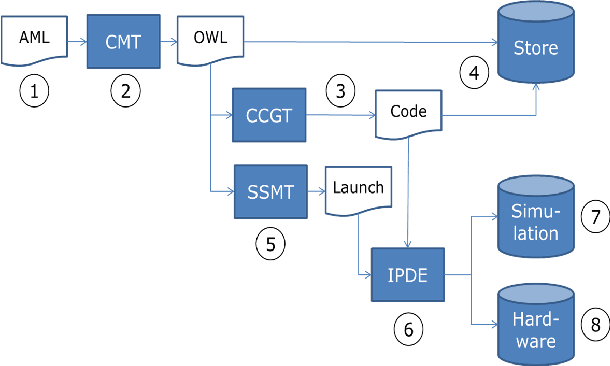
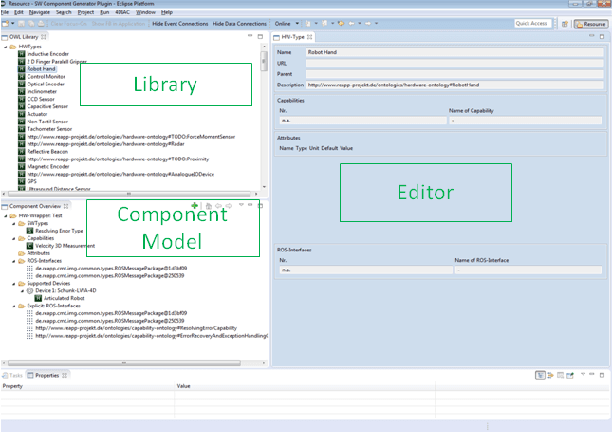
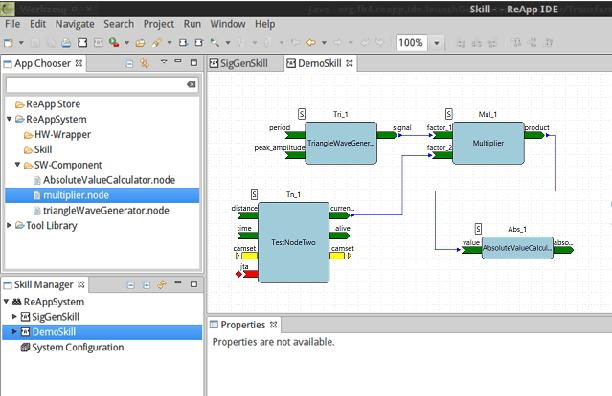
This paper presents a novel ontology-driven software engineering approach for the development of industrial robotics control software. It introduces the ReApp architecture that synthesizes model-driven engineering with semantic technologies to facilitate the development and reuse of ROS-based components and applications. In ReApp, we show how different ontological classification systems for hardware, software, and capabilities help developers in discovering suitable software components for their tasks and in applying them correctly. The proposed model-driven tooling enables developers to work at higher abstraction levels and fosters automatic code generation. It is underpinned by ontologies to minimize discontinuities in the development workflow, with an integrated development environment presenting a seamless interface to the user. First results show the viability and synergy of the selected approach when searching for or developing software with reuse in mind.