 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApplication of the Neural Network Dependability Kit in Real-World Environments
Dec 14, 2020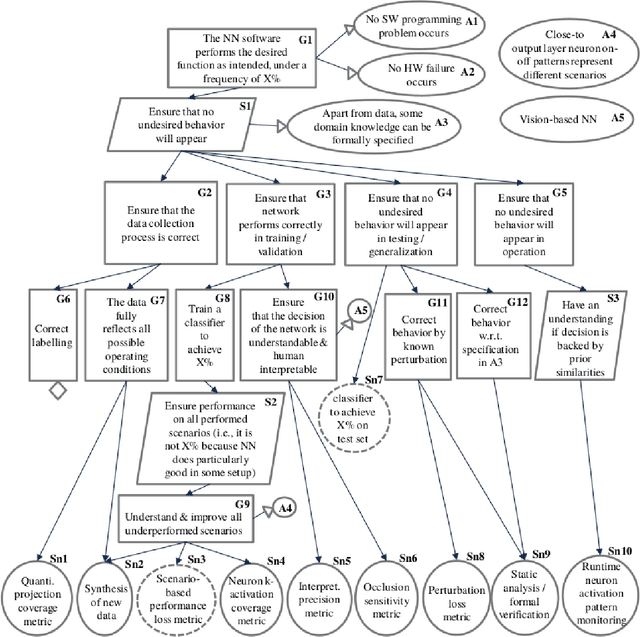
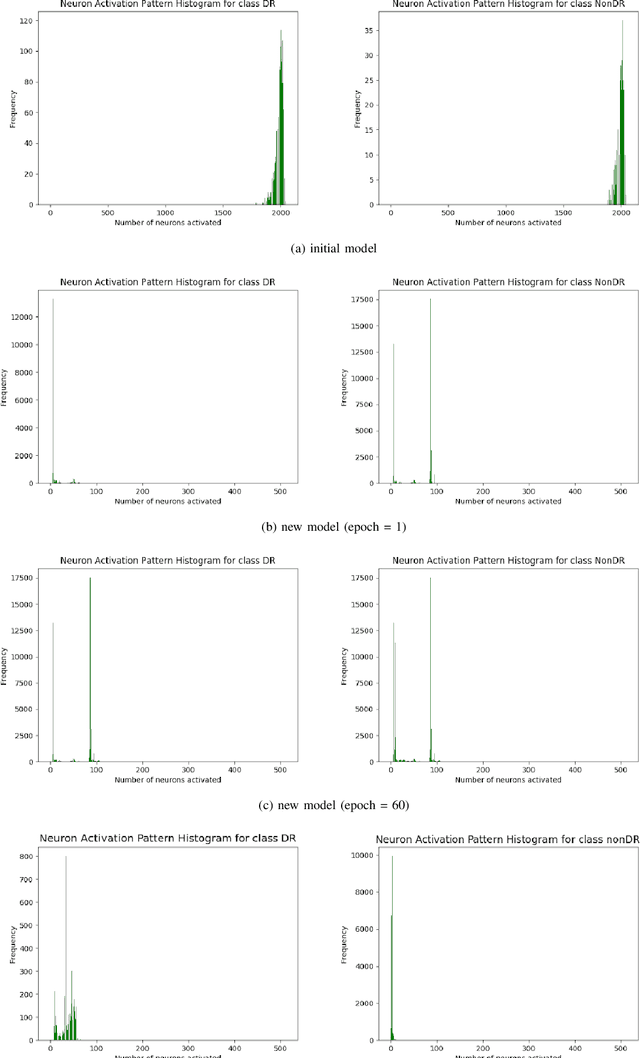
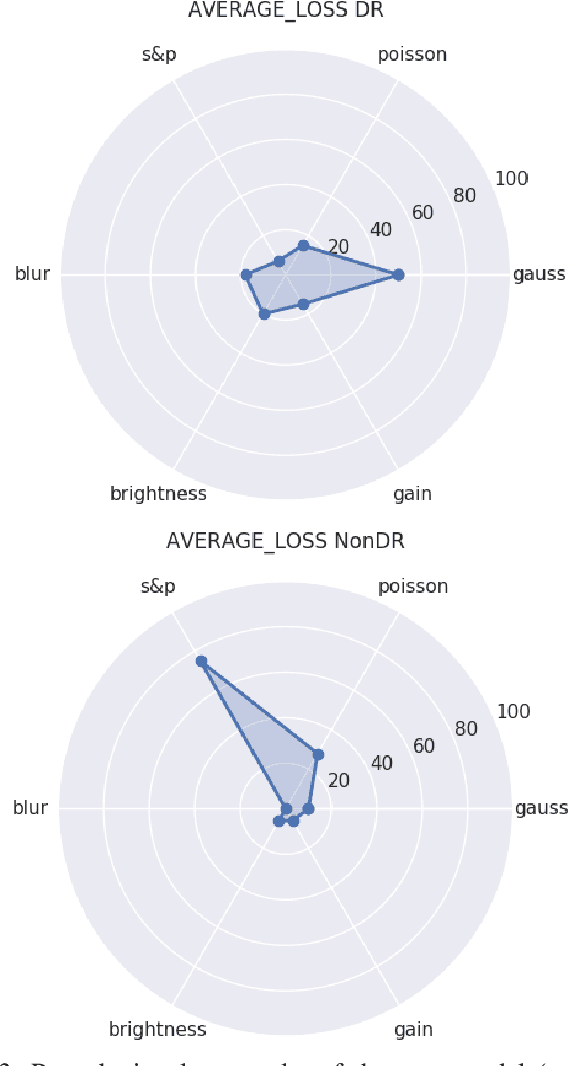
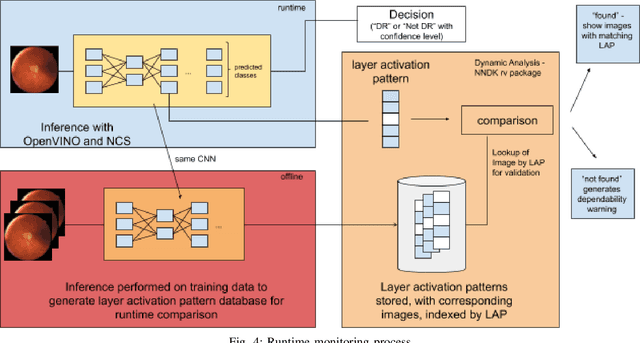
In this paper, we provide a guideline for using the Neural Network Dependability Kit (NNDK) during the development process of NN models, and show how the algorithm is applied in two image classification use cases. The case studies demonstrate the usage of the dependability kit to obtain insights about the NN model and how they informed the development process of the neural network model. After interpreting neural networks via the different metrics available in the NNDK, the developers were able to increase the NNs' accuracy, trust the developed networks, and make them more robust. In addition, we obtained a novel application-oriented technique to provide supporting evidence for an NN's classification result to the user. In the medical image classification use case, it was used to retrieve case images from the training dataset that were similar to the current patient's image and could therefore act as a support for the NN model's decision and aid doctors in interpreting the results.
A Model-Driven Engineering Approach for ROS using Ontological Semantics
Jan 15, 2016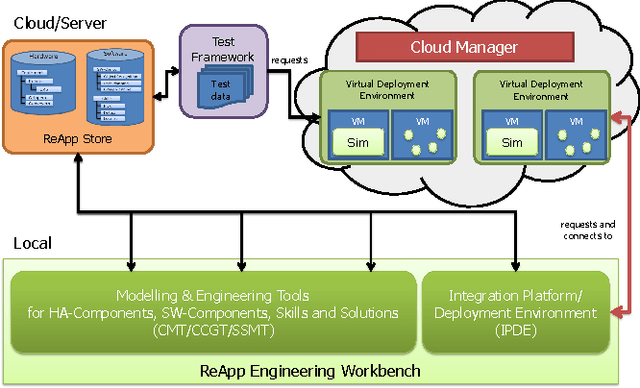
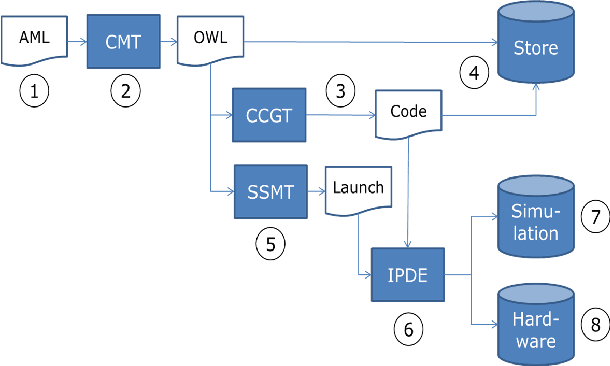
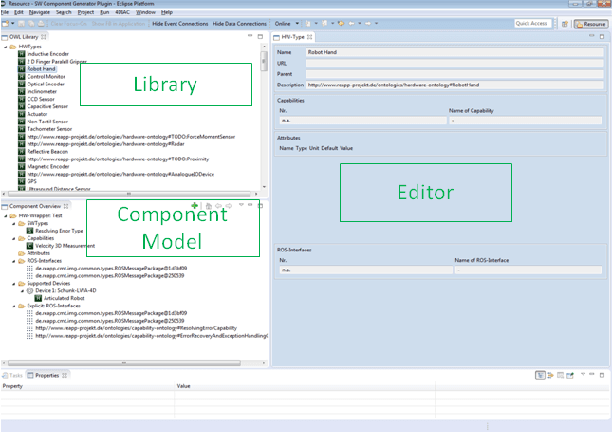
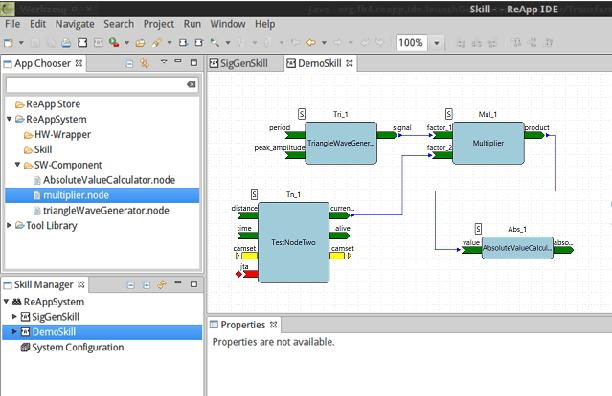
This paper presents a novel ontology-driven software engineering approach for the development of industrial robotics control software. It introduces the ReApp architecture that synthesizes model-driven engineering with semantic technologies to facilitate the development and reuse of ROS-based components and applications. In ReApp, we show how different ontological classification systems for hardware, software, and capabilities help developers in discovering suitable software components for their tasks and in applying them correctly. The proposed model-driven tooling enables developers to work at higher abstraction levels and fosters automatic code generation. It is underpinned by ontologies to minimize discontinuities in the development workflow, with an integrated development environment presenting a seamless interface to the user. First results show the viability and synergy of the selected approach when searching for or developing software with reuse in mind.