 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge Distillation Detection for Open-weights Models
Oct 02, 2025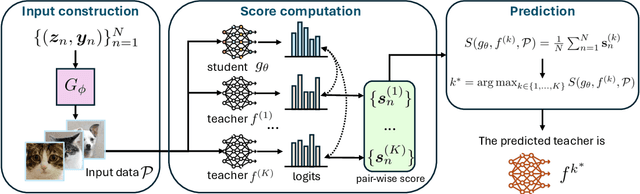
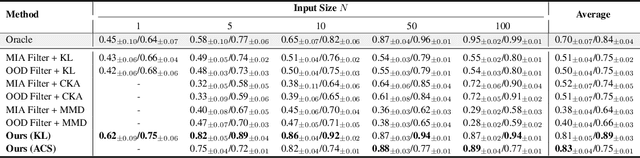
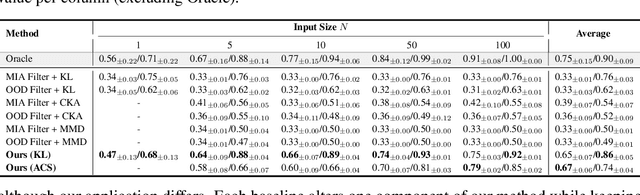
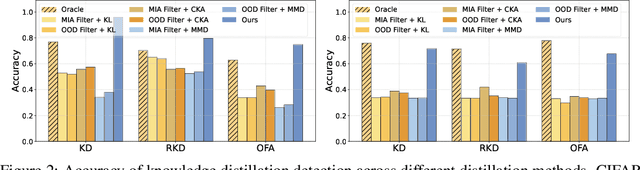
We propose the task of knowledge distillation detection, which aims to determine whether a student model has been distilled from a given teacher, under a practical setting where only the student's weights and the teacher's API are available. This problem is motivated by growing concerns about model provenance and unauthorized replication through distillation. To address this task, we introduce a model-agnostic framework that combines data-free input synthesis and statistical score computation for detecting distillation. Our approach is applicable to both classification and generative models. Experiments on diverse architectures for image classification and text-to-image generation show that our method improves detection accuracy over the strongest baselines by 59.6% on CIFAR-10, 71.2% on ImageNet, and 20.0% for text-to-image generation. The code is available at https://github.com/shqii1j/distillation_detection.
User-Assisted Networked Sensing in OFDM Cellular Network with Erroneous Anchor Position Information
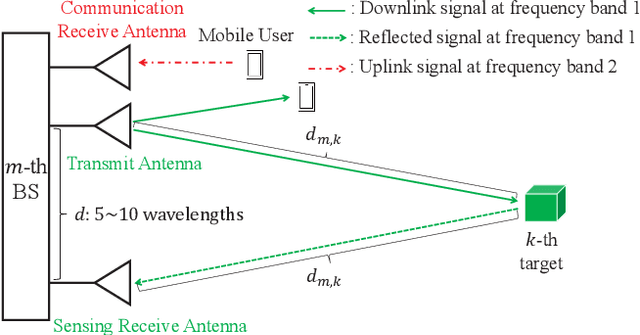
Dec 20, 2023In the sixth-generation (6G) integrated sensing and communication (ISAC) cellular network, base stations (BSs) can collaborate with each other to reap not only the cooperative communication gain, but also the networked sensing gain. In contrast to cooperative communication where both line-of-sight (LOS) paths and non-line-of-sight (NLOS) paths are useful, networked sensing mainly relies on the LOS paths. However, in practice, the number of BSs possessing LOS paths to a target can be small, leading to marginal networked sensing gain. Because the density of user equipments (UEs) is much larger than that of the BSs, this paper considers a UE-assisted networked sensing architecture, where a BS transmits communication signals in the downlink, while the UEs that receive the echo signals scattered by a target can cooperate with the BS to localize it. Under this scheme, however, the positions of the UEs are estimated by Global Positioning System (GPS) and subject to unknown errors. If some UEs with significantly erroneous position information are used as anchors, the localization performance can be severely degraded. Based on the outlier detection technique, this paper proposes an efficient method to select a subset of UEs with accurate position information as anchors for localizing the target. Numerical results show that our scheme can select good UEs as anchors with very high probability, indicating that networked sensing can be realized in practice with the aid of UEs.
Sequential Subset Matching for Dataset Distillation
Nov 02, 2023



Dataset distillation is a newly emerging task that synthesizes a small-size dataset used in training deep neural networks (DNNs) for reducing data storage and model training costs. The synthetic datasets are expected to capture the essence of the knowledge contained in real-world datasets such that the former yields a similar performance as the latter. Recent advancements in distillation methods have produced notable improvements in generating synthetic datasets. However, current state-of-the-art methods treat the entire synthetic dataset as a unified entity and optimize each synthetic instance equally. This static optimization approach may lead to performance degradation in dataset distillation. Specifically, we argue that static optimization can give rise to a coupling issue within the synthetic data, particularly when a larger amount of synthetic data is being optimized. This coupling issue, in turn, leads to the failure of the distilled dataset to extract the high-level features learned by the deep neural network (DNN) in the latter epochs. In this study, we propose a new dataset distillation strategy called Sequential Subset Matching (SeqMatch), which tackles this problem by adaptively optimizing the synthetic data to encourage sequential acquisition of knowledge during dataset distillation. Our analysis indicates that SeqMatch effectively addresses the coupling issue by sequentially generating the synthetic instances, thereby enhancing its performance significantly. Our proposed SeqMatch outperforms state-of-the-art methods in various datasets, including SVNH, CIFAR-10, CIFAR-100, and Tiny ImageNet. Our code is available at https://github.com/shqii1j/seqmatch.
Joint Data Association, NLOS Mitigation, and Clutter Suppression for Networked Device-Free Sensing in 6G Cellular Network
Feb 16, 2023

Recently, there is a growing interest in achieving integrated sensing and communication (ISAC) in the sixth-generation (6G) cellular network. Inspired by this trend and the success of cooperative communication in cloud radio access network, this paper considers a networked device-free sensing architecture based on base station (BS) cooperation to transform the cellular network into a huge sensor that can provide ubiquitous and high-performance sensing services. Under this framework, the BSs first transmit the downlink communication signals to the mobile users and then estimate the range information of the targets based on their echoes. Next, a central processor collects the range information from all the BSs via the fronthaul links and localizes each target based on its distances to various BSs. To enable the above strategy in the 6G network, we will perform joint data association, non-line-of-sight (NLOS) mitigation, and clutter suppression, such that the central processor is able to find out the useful range estimations extracted from the line-of-sight (LOS) paths and match them to the right targets for localization. Numerical results show that our interested networked device-free sensing scheme for the 6G network can localize the targets with high accuracy in the challenging multi-path propagation environment.
Sequential TOA-Based Moving Target Localization in Multi-Agent Networks
Sep 24, 2021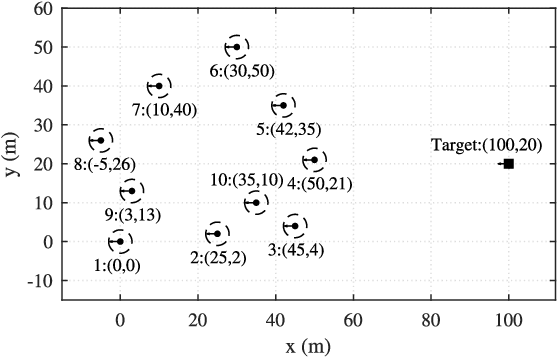
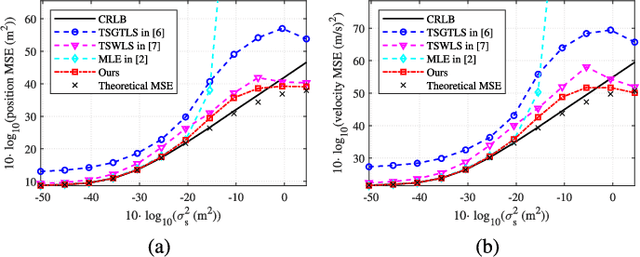
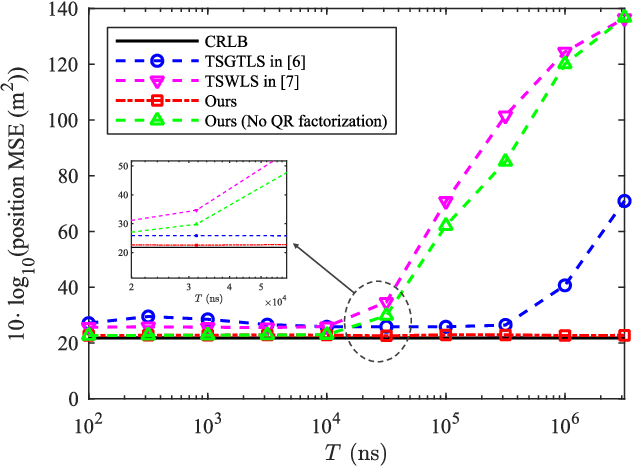
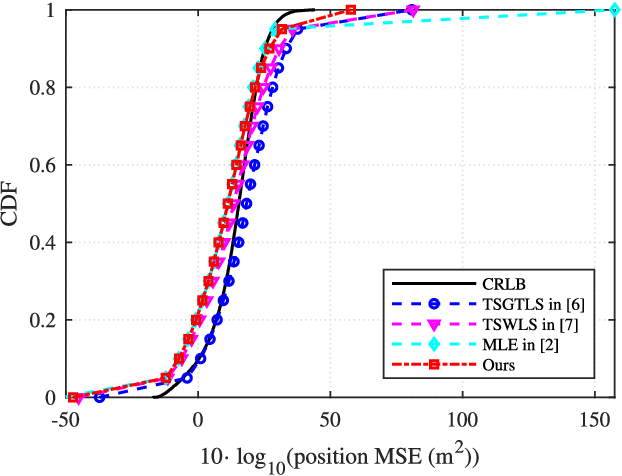
Localizing moving targets in unknown harsh environments has always been a severe challenge. This letter investigates a novel localization system based on multi-agent networks, where multiple agents serve as mobile anchors broadcasting their time-space information to the targets. We study how the moving target can localize itself using the sequential time of arrival (TOA) of the one-way broadcast signals. An extended two-step weighted least squares (TSWLS) method is proposed to jointly estimate the position and velocity of the target in the presence of agent information uncertainties. We also address the large target clock offset (LTCO) problem for numerical stability. Analytical results reveal that our method reaches the Cramer-Rao lower bound (CRLB) under small noises. Numerical results show that the proposed method performs better than the existing algorithms.
Device-Free Sensing in OFDM Cellular Network
Aug 20, 2021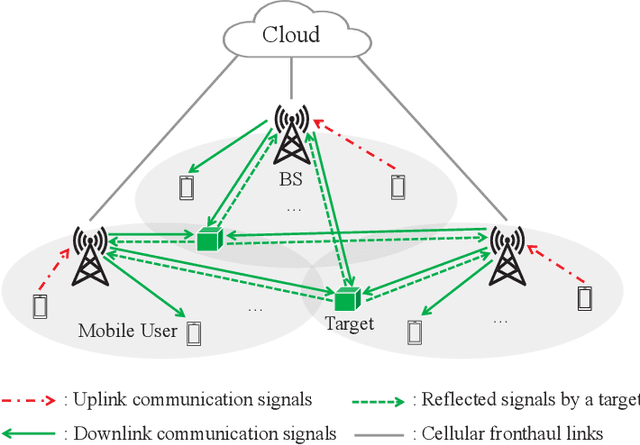

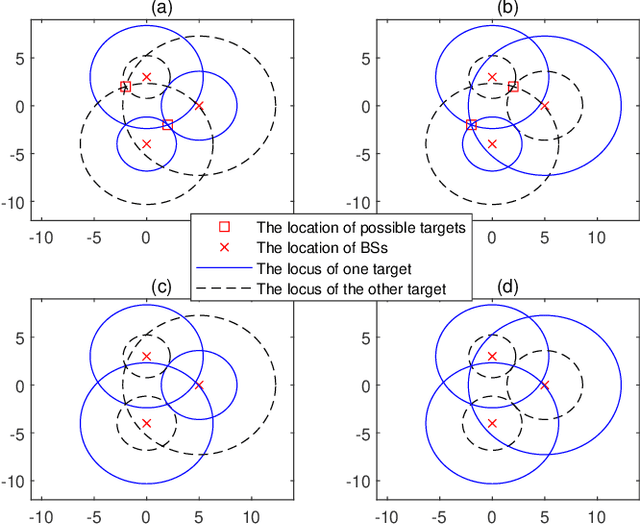
This paper considers device-free sensing in an orthogonal frequency division multiplexing (OFDM) cellular network to enable integrated sensing and communication (ISAC). A novel two-phase sensing framework is proposed to localize the passive targets that cannot transmit/receive reference signals to/from the base stations (BSs), where the ranges of the targets are estimated based on their reflected OFDM signals to the BSs in Phase I, and the location of each target is estimated based on its values of distance to the BSs in Phase II. Specifically, in Phase I, we design a model-free range estimation approach by leveraging the OFDM channel estimation technique for determining the delay values of all the BS-target-BS paths, which does not rely on any BS-target channel model. In Phase II, we reveal that ghost targets may be falsely detected in some cases as all the targets reflect the same signals to the BSs, which thus do not know how to match each estimated range with the right target. Interestingly, we show that the above issue is not a fundamental limitation for device-free sensing: under the ideal case of perfect range estimation in Phase I, the probability for ghost targets to exist is proved to be negligible when the targets are randomly located. Moreover, under the practical case of imperfect range estimation, we propose an efficient algorithm for joint range matching and target localization. Numerical results show that our proposed framework can achieve very high accuracy in the localization of passive targets, which increases with the system bandwidth.
Range-only Collaborative Localization for Ground Vehicles
Dec 03, 2019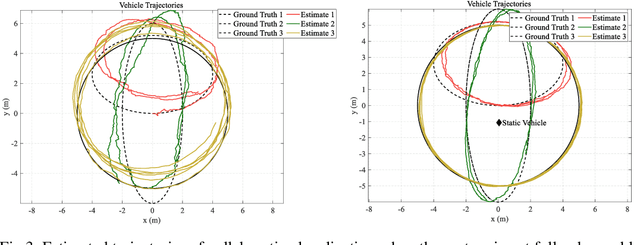

High-accuracy absolute localization for a team of vehicles is essential when accomplishing various kinds of tasks. As a promising approach, collaborative localization fuses the individual motion measurements and the inter-vehicle measurements to collaboratively estimate the states. In this paper, we focus on the range-only collaborative localization, which specifies the inter-vehicle measurements as inter-vehicle ranging measurements. We first investigate the observability properties of the system and derive that to achieve bounded localization errors, two vehicles are required to remain static like external infrastructures. Under the guide of the observability analysis, we then propose our range-only collaborative localization system which categorize the ground vehicles into two static vehicles and dynamic vehicles. The vehicles are connected utilizing a UWB network that is capable of both producing inter-vehicle ranging measurements and communication. Simulation results validate the observability analysis and demonstrate that collaborative localization is capable of achieving higher accuracy when utilizing the inter-vehicle measurements. Extensive experimental results are performed for a team of 3 and 5 vehicles. The real-world results illustrate that our proposed system enables accurate and real-time estimation of all vehicles' absolute poses.
Visual-UWB Navigation System for Unknown Environments
Dec 03, 2019Navigation applications relying on the Global Navigation Satellite System (GNSS) are limited in indoor environments and GNSS-denied outdoor terrains such as dense urban or forests. In this paper, we present a novel accurate, robust and low-cost GNSS-independent navigation system, which is composed of a monocular camera and Ultra-wideband (UWB) transceivers. Visual techniques have gained excellent results when computing the incremental motion of the sensor, and UWB methods have proved to provide promising localization accuracy due to the high time resolution of the UWB ranging signals. However, the monocular visual techniques with scale ambiguity are not suitable for applications requiring metric results, and UWB methods assume that the positions of the UWB transceiver anchor are pre-calibrated and known, thus precluding their application in unknown and challenging environments. To this end, we advocate leveraging the monocular camera and UWB to create a map of visual features and UWB anchors. We propose a visual-UWB Simultaneous Localization and Mapping (SLAM) algorithm which tightly combines visual and UWB measurements to form a joint non-linear optimization problem on Lie-Manifold. The 6 Degrees of Freedom (DoF) state of the vehicles and the map are estimated by minimizing the UWB ranging errors and landmark reprojection errors. Our navigation system starts with an exploratory task which performs the real-time visual-UWB SLAM to obtain the global map, then the navigation task by reusing this global map. The tasks can be performed by different vehicles in terms of equipped sensors and payload capability in a heterogeneous team. We validate our system on the public datasets, achieving typical centimeter accuracy and 0.1% scale error.
BLAS: Broadcast Relative Localization and Clock Synchronization for Dynamic Dense Multi-Agent Systems
Nov 27, 2019



The spatiotemporal information plays crucial roles in a multi-agent system (MAS). However, for a highly dynamic and dense MAS in unknown environments, estimating its spatiotemporal states is a difficult problem. In this paper, we present BLAS: a wireless broadcast relative localization and clock synchronization system to address these challenges. Our BLAS system exploits a broadcast architecture, under which a MAS is categorized into parent agents that broadcast wireless packets and child agents that are passive receivers, to reduce the number of required packets among agents for relative localization and clock synchronization. We first propose an asynchronous broadcasting and passively receiving (ABPR) protocol. The protocol schedules the broadcast of parent agents using a distributed time division multiple access (D-TDMA) scheme and delivers inter-agent information used for joint relative localization and clock synchronization. We then present distributed state estimation approaches in parent and child agents that utilize the broadcast inter-agent information for joint estimation of spatiotemporal states. The simulations and real-world experiments based on ultra-wideband (UWB) illustrate that our proposed BLAS cannot only enable accurate, high-frequency and real-time estimation of relative position and clock parameters but also support theoretically an unlimited number of agents.