 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn ACO-MPC Framework for Energy-Efficient and Collision-Free Path Planning in Autonomous Maritime Navigation
Apr 22, 2025Automated driving on ramps presents significant challenges due to the need to balance both safety and efficiency during lane changes. This paper proposes an integrated planner for automated vehicles (AVs) on ramps, utilizing an unsatisfactory level metric for efficiency and arrow-cluster-based sampling for safety. The planner identifies optimal times for the AV to change lanes, taking into account the vehicle's velocity as a key factor in efficiency. Additionally, the integrated planner employs arrow-cluster-based sampling to evaluate collision risks and select an optimal lane-changing curve. Extensive simulations were conducted in a ramp scenario to verify the planner's efficient and safe performance. The results demonstrate that the proposed planner can effectively select an appropriate lane-changing time point and a safe lane-changing curve for AVs, without incurring any collisions during the maneuver.
V3Det Challenge 2024 on Vast Vocabulary and Open Vocabulary Object Detection: Methods and Results
Jun 17, 2024


Detecting objects in real-world scenes is a complex task due to various challenges, including the vast range of object categories, and potential encounters with previously unknown or unseen objects. The challenges necessitate the development of public benchmarks and challenges to advance the field of object detection. Inspired by the success of previous COCO and LVIS Challenges, we organize the V3Det Challenge 2024 in conjunction with the 4th Open World Vision Workshop: Visual Perception via Learning in an Open World (VPLOW) at CVPR 2024, Seattle, US. This challenge aims to push the boundaries of object detection research and encourage innovation in this field. The V3Det Challenge 2024 consists of two tracks: 1) Vast Vocabulary Object Detection: This track focuses on detecting objects from a large set of 13204 categories, testing the detection algorithm's ability to recognize and locate diverse objects. 2) Open Vocabulary Object Detection: This track goes a step further, requiring algorithms to detect objects from an open set of categories, including unknown objects. In the following sections, we will provide a comprehensive summary and analysis of the solutions submitted by participants. By analyzing the methods and solutions presented, we aim to inspire future research directions in vast vocabulary and open-vocabulary object detection, driving progress in this field. Challenge homepage: https://v3det.openxlab.org.cn/challenge
Enhanced Object Detection: A Study on Vast Vocabulary Object Detection Track for V3Det Challenge 2024
Jun 13, 2024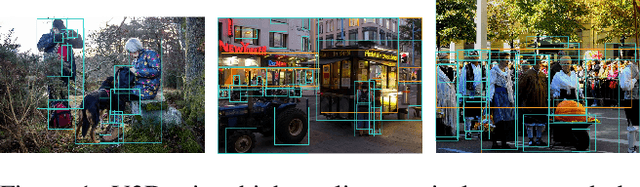

In this technical report, we present our findings from the research conducted on the Vast Vocabulary Visual Detection (V3Det) dataset for Supervised Vast Vocabulary Visual Detection task. How to deal with complex categories and detection boxes has become a difficulty in this track. The original supervised detector is not suitable for this task. We have designed a series of improvements, including adjustments to the network structure, changes to the loss function, and design of training strategies. Our model has shown improvement over the baseline and achieved excellent rankings on the Leaderboard for both the Vast Vocabulary Object Detection (Supervised) track and the Open Vocabulary Object Detection (OVD) track of the V3Det Challenge 2024.