 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen Problems and Fundamental Limitations of Reinforcement Learning from Human Feedback
Jul 27, 2023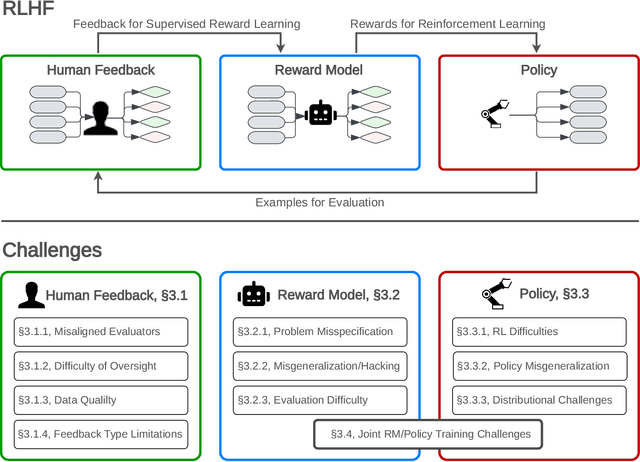

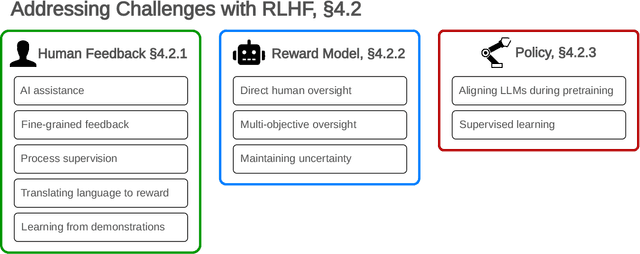
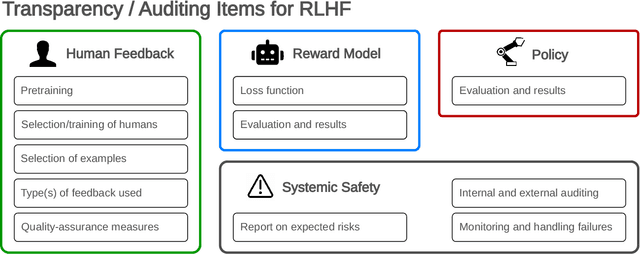
Reinforcement learning from human feedback (RLHF) is a technique for training AI systems to align with human goals. RLHF has emerged as the central method used to finetune state-of-the-art large language models (LLMs). Despite this popularity, there has been relatively little public work systematizing its flaws. In this paper, we (1) survey open problems and fundamental limitations of RLHF and related methods; (2) overview techniques to understand, improve, and complement RLHF in practice; and (3) propose auditing and disclosure standards to improve societal oversight of RLHF systems. Our work emphasizes the limitations of RLHF and highlights the importance of a multi-faceted approach to the development of safer AI systems.
The act of remembering: a study in partially observable reinforcement learning
Oct 05, 2020
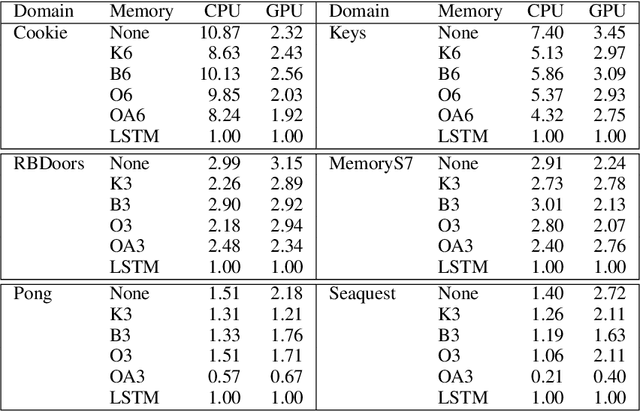


Reinforcement Learning (RL) agents typically learn memoryless policies---policies that only consider the last observation when selecting actions. Learning memoryless policies is efficient and optimal in fully observable environments. However, some form of memory is necessary when RL agents are faced with partial observability. In this paper, we study a lightweight approach to tackle partial observability in RL. We provide the agent with an external memory and additional actions to control what, if anything, is written to the memory. At every step, the current memory state is part of the agent's observation, and the agent selects a tuple of actions: one action that modifies the environment and another that modifies the memory. When the external memory is sufficiently expressive, optimal memoryless policies yield globally optimal solutions. Unfortunately, previous attempts to use external memory in the form of binary memory have produced poor results in practice. Here, we investigate alternative forms of memory in support of learning effective memoryless policies. Our novel forms of memory outperform binary and LSTM-based memory in well-established partially observable domains.