 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGloSIS: The Global Soil Information System Web Ontology
Mar 25, 2024



Established in 2012 by members of the Food and Agriculture Organisation (FAO), the Global Soil Partnership (GSP) is a global network of stakeholders promoting sound land and soil management practices towards a sustainable world food system. However, soil survey largely remains a local or regional activity, bound to heterogeneous methods and conventions. Recognising the relevance of global and trans-national policies towards sustainable land management practices, the GSP elected data harmonisation and exchange as one of its key lines of action. Building upon international standards and previous work towards a global soil data ontology, an improved domain model was eventually developed within the GSP [54], the basis for a Global Soil Information System (GloSIS). This work also identified the Semantic Web as a possible avenue to operationalise the domain model. This article presents the GloSIS web ontology, an implementation of the GloSIS domain model with the Web Ontology Language (OWL). Thoroughly employing a host of Semantic Web standards (SOSA, SKOS, GeoSPARQL, QUDT), GloSIS lays out not only a soil data ontology but also an extensive set of ready-to-use code-lists for soil description and physio-chemical analysis. Various examples are provided on the provision and use of GloSIS-compliant linked data, showcasing the contribution of this ontology to the discovery, exploration, integration and access of soil data.
Athletic Mobile Manipulator System for Robotic Wheelchair Tennis
Oct 05, 2022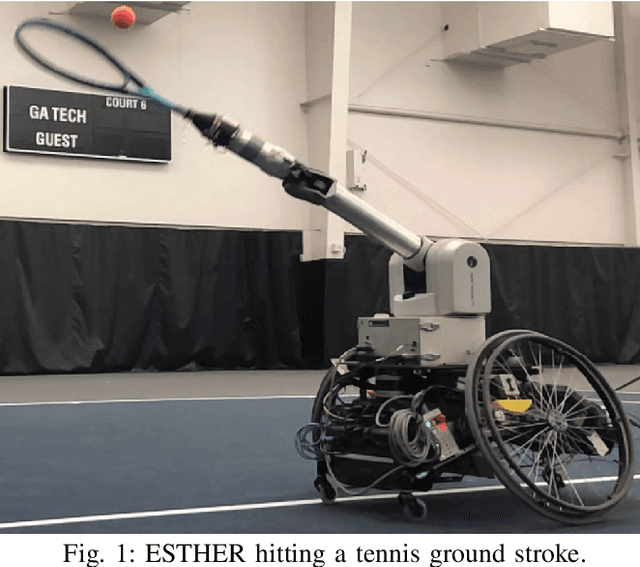
Athletics are a quintessential and universal expression of humanity. From French monks who in the 12th century invented jeu de paume, the precursor to modern lawn tennis, back to the K'iche' people who played the Maya Ballgame as a form of religious expression over three thousand years ago, humans have sought to train their minds and bodies to excel in sporting contests. Advances in robotics are opening up the possibility of robots in sports. Yet, key challenges remain, as most prior works in robotics for sports are limited to pristine sensing environments, do not require significant force generation, or are on miniaturized scales unsuited for joint human-robot play. In this paper, we propose the first open-source, autonomous robot for playing regulation wheelchair tennis. We demonstrate the performance of our full-stack system in executing ground strokes and evaluate each of the system's hardware and software components. The goal of this paper is to (1) inspire more research in human-scale robot athletics and (2) establish the first baseline towards developing a robot in future work that can serve as a teammate for mixed, human-robot doubles play. Our paper contributes to the science of systems design and poses a set of key challenges for the robotics community to address in striving towards a vision of human-robot collaboration in sports.
Agricultural Robotics: The Future of Robotic Agriculture
Aug 02, 2018Agri-Food is the largest manufacturing sector in the UK. It supports a food chain that generates over {\pounds}108bn p.a., with 3.9m employees in a truly international industry and exports {\pounds}20bn of UK manufactured goods. However, the global food chain is under pressure from population growth, climate change, political pressures affecting migration, population drift from rural to urban regions and the demographics of an aging global population. These challenges are recognised in the UK Industrial Strategy white paper and backed by significant investment via a Wave 2 Industrial Challenge Fund Investment ("Transforming Food Production: from Farm to Fork"). Robotics and Autonomous Systems (RAS) and associated digital technologies are now seen as enablers of this critical food chain transformation. To meet these challenges, this white paper reviews the state of the art in the application of RAS in Agri-Food production and explores research and innovation needs to ensure these technologies reach their full potential and deliver the necessary impacts in the Agri-Food sector.