 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Material and Texture Representation Learning for Remote Sensing Tasks
Dec 03, 2021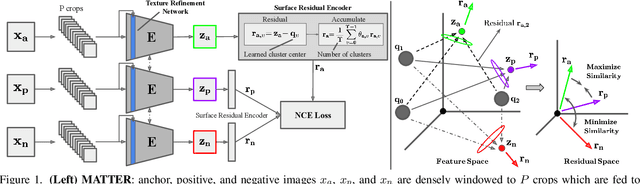



Self-supervised learning aims to learn image feature representations without the usage of manually annotated labels. It is often used as a precursor step to obtain useful initial network weights which contribute to faster convergence and superior performance of downstream tasks. While self-supervision allows one to reduce the domain gap between supervised and unsupervised learning without the usage of labels, the self-supervised objective still requires a strong inductive bias to downstream tasks for effective transfer learning. In this work, we present our material and texture based self-supervision method named MATTER (MATerial and TExture Representation Learning), which is inspired by classical material and texture methods. Material and texture can effectively describe any surface, including its tactile properties, color, and specularity. By extension, effective representation of material and texture can describe other semantic classes strongly associated with said material and texture. MATTER leverages multi-temporal, spatially aligned remote sensing imagery over unchanged regions to learn invariance to illumination and viewing angle as a mechanism to achieve consistency of material and texture representation. We show that our self-supervision pre-training method allows for up to 24.22% and 6.33% performance increase in unsupervised and fine-tuned setups, and up to 76% faster convergence on change detection, land cover classification, and semantic segmentation tasks.
Towards Single Stage Weakly Supervised Semantic Segmentation
Jun 28, 2021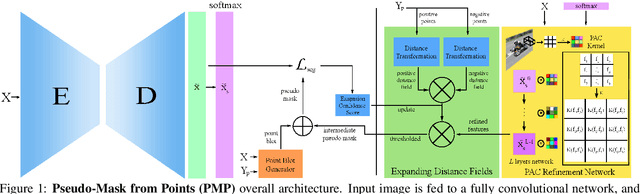


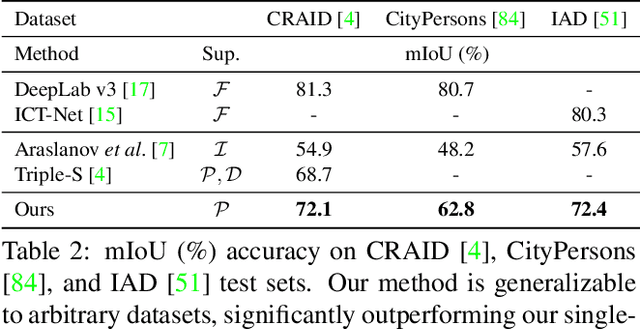
The costly process of obtaining semantic segmentation labels has driven research towards weakly supervised semantic segmentation (WSSS) methods, using only image-level, point, or box labels. The lack of dense scene representation requires methods to increase complexity to obtain additional semantic information about the scene, often done through multiple stages of training and refinement. Current state-of-the-art (SOTA) models leverage image-level labels to produce class activation maps (CAMs) which go through multiple stages of refinement before they are thresholded to make pseudo-masks for supervision. The multi-stage approach is computationally expensive, and dependency on image-level labels for CAMs generation lacks generalizability to more complex scenes. In contrary, our method offers a single-stage approach generalizable to arbitrary dataset, that is trainable from scratch, without any dependency on pre-trained backbones, classification, or separate refinement tasks. We utilize point annotations to generate reliable, on-the-fly pseudo-masks through refined and filtered features. While our method requires point annotations that are only slightly more expensive than image-level annotations, we are to demonstrate SOTA performance on benchmark datasets (PascalVOC 2012), as well as significantly outperform other SOTA WSSS methods on recent real-world datasets (CRAID, CityPersons, IAD).
AI on the Bog: Monitoring and Evaluating Cranberry Crop Risk
Nov 08, 2020

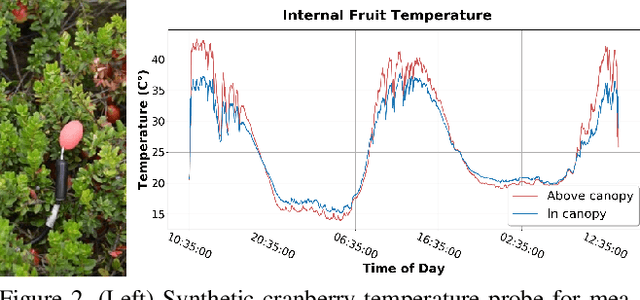

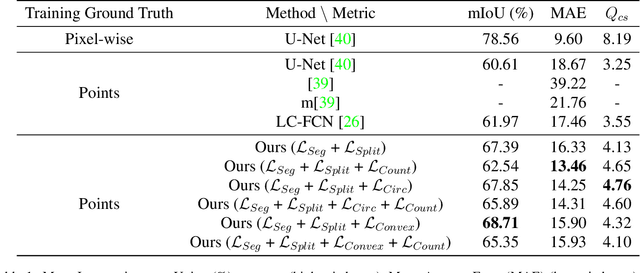
Machine vision for precision agriculture has attracted considerable research interest in recent years. The goal of this paper is to develop an end-to-end cranberry health monitoring system to enable and support real time cranberry over-heating assessment to facilitate informed decisions that may sustain the economic viability of the farm. Toward this goal, we propose two main deep learning-based modules for: 1) cranberry fruit segmentation to delineate the exact fruit regions in the cranberry field image that are exposed to sun, 2) prediction of cloud coverage conditions and sun irradiance to estimate the inner temperature of exposed cranberries. We develop drone-based field data and ground-based sky data collection systems to collect video imagery at multiple time points for use in crop health analysis. Extensive evaluation on the data set shows that it is possible to predict exposed fruit's inner temperature with high accuracy (0.02% MAPE). The sun irradiance prediction error was found to be 8.41-20.36% MAPE in the 5-20 minutes time horizon. With 62.54% mIoU for segmentation and 13.46 MAE for counting accuracies in exposed fruit identification, this system is capable of giving informed feedback to growers to take precautionary action (e.g. irrigation) in identified crop field regions with higher risk of sunburn in the near future. Though this novel system is applied for cranberry health monitoring, it represents a pioneering step forward for efficient farming and is useful in precision agriculture beyond the problem of cranberry overheating.
H2O-Net: Self-Supervised Flood Segmentation via Adversarial Domain Adaptation and Label Refinement
Oct 11, 2020



Accurate flood detection in near real time via high resolution, high latency satellite imagery is essential to prevent loss of lives by providing quick and actionable information. Instruments and sensors useful for flood detection are only available in low resolution, low latency satellites with region re-visit periods of up to 16 days, making flood alerting systems that use such satellites unreliable. This work presents H2O-Network, a self supervised deep learning method to segment floods from satellites and aerial imagery by bridging domain gap between low and high latency satellite and coarse-to-fine label refinement. H2O-Net learns to synthesize signals highly correlative with water presence as a domain adaptation step for semantic segmentation in high resolution satellite imagery. Our work also proposes a self-supervision mechanism, which does not require any hand annotation, used during training to generate high quality ground truth data. We demonstrate that H2O-Net outperforms the state-of-the-art semantic segmentation methods on satellite imagery by 10% and 12% pixel accuracy and mIoU respectively for the task of flood segmentation. We emphasize the generalizability of our model by transferring model weights trained on satellite imagery to drone imagery, a highly different sensor and domain.
Finding Berries: Segmentation and Counting of Cranberries using Point Supervision and Shape Priors
Apr 24, 2020


Precision agriculture has become a key factor for increasing crop yields by providing essential information to decision makers. In this work, we present a deep learning method for simultaneous segmentation and counting of cranberries to aid in yield estimation and sun exposure predictions. Notably, supervision is done using low cost center point annotations. The approach, named Triple-S Network, incorporates a three-part loss with shape priors to promote better fitting to objects of known shape typical in agricultural scenes. Our results improve overall segmentation performance by more than 6.74% and counting results by 22.91% when compared to state-of-the-art. To train and evaluate the network, we have collected the CRanberry Aerial Imagery Dataset (CRAID), the largest dataset of aerial drone imagery from cranberry fields. This dataset will be made publicly available.
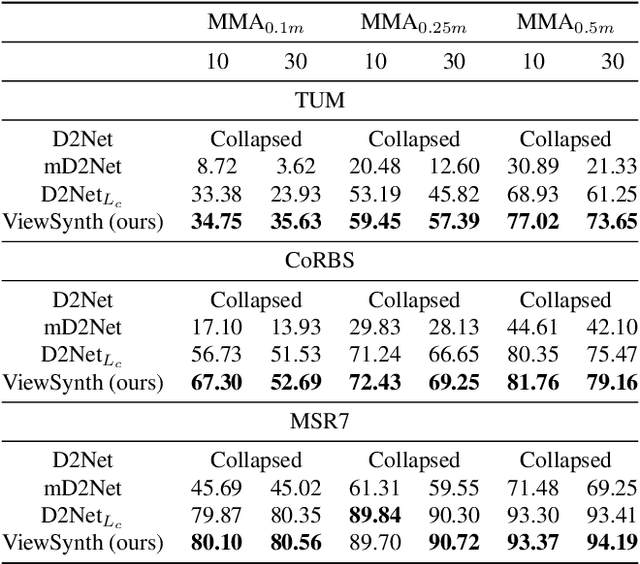
ViewSynth: Learning Local Features from Depth using View Synthesis
Nov 22, 2019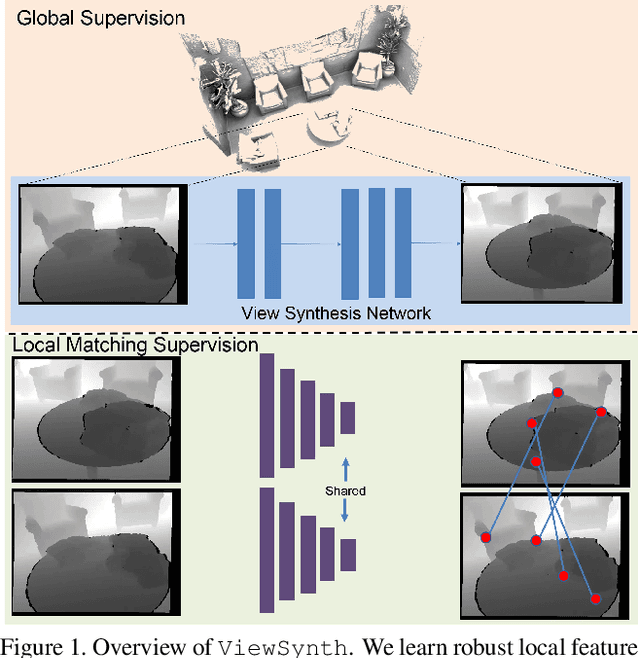
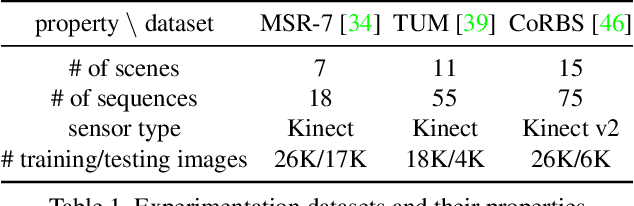
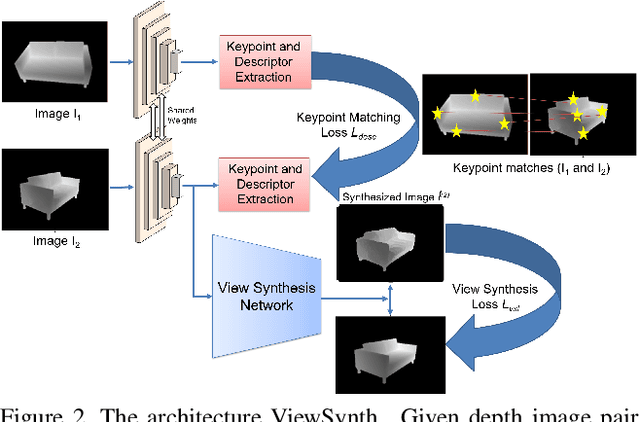
We address the problem of jointly detecting keypoints and learning descriptors in depth data with challenging viewpoint changes. Despite great improvements in recent RGB based local feature learning methods, we show that these methods cannot be directly transferred to the depth image modality. These methods also do not utilize the 2.5D information present in depth images. We propose a framework ViewSynth, designed to jointly learn 3D structure aware depth image representation, and local features from that representation. ViewSynth consists of `View Synthesis Network' (VSN), trained to synthesize depth image views given a depth image representation and query viewpoints. ViewSynth framework includes joint learning of keypoints and feature descriptor, paired with our view synthesis loss, which guides the model to propose keypoints robust to viewpoint changes. We demonstrate the effectiveness of our formulation on several depth image datasets, where learned local features using our proposed ViewSynth framework outperforms the state-of-the-art methods in keypoint matching and camera localization tasks.