 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParkingTwin: Training-Free Streaming 3D Reconstruction for Parking-Lot Digital Twins
Jan 20, 2026High-fidelity parking-lot digital twins provide essential priors for path planning, collision checking, and perception validation in Automated Valet Parking (AVP). Yet robot-oriented reconstruction faces a trilemma: sparse forward-facing views cause weak parallax and ill-posed geometry; dynamic occlusions and extreme lighting hinder stable texture fusion; and neural rendering typically needs expensive offline optimization, violating edge-side streaming constraints. We propose ParkingTwin, a training-free, lightweight system for online streaming 3D reconstruction. First, OSM-prior-driven geometric construction uses OpenStreetMap semantic topology to directly generate a metric-consistent TSDF, replacing blind geometric search with deterministic mapping and avoiding costly optimization. Second, geometry-aware dynamic filtering employs a quad-modal constraint field (normal/height/depth consistency) to reject moving vehicles and transient occlusions in real time. Third, illumination-robust fusion in CIELAB decouples luminance and chromaticity via adaptive L-channel weighting and depth-gradient suppression, reducing seams under abrupt lighting changes. ParkingTwin runs at 30+ FPS on an entry-level GTX 1660. On a 68,000 m^2 real-world dataset, it achieves SSIM 0.87 (+16.0%), delivers about 15x end-to-end speedup, and reduces GPU memory by 83.3% compared with state-of-the-art 3D Gaussian Splatting (3DGS) that typically requires high-end GPUs (RTX 4090D). The system outputs explicit triangle meshes compatible with Unity/Unreal digital-twin pipelines. Project page: https://mihoutao-liu.github.io/ParkingTwin/
Self-Supervised Learning for User Localization
Apr 19, 2024



Machine learning techniques have shown remarkable accuracy in localization tasks, but their dependency on vast amounts of labeled data, particularly Channel State Information (CSI) and corresponding coordinates, remains a bottleneck. Self-supervised learning techniques alleviate the need for labeled data, a potential that remains largely untapped and underexplored in existing research. Addressing this gap, we propose a pioneering approach that leverages self-supervised pretraining on unlabeled data to boost the performance of supervised learning for user localization based on CSI. We introduce two pretraining Auto Encoder (AE) models employing Multi Layer Perceptrons (MLPs) and Convolutional Neural Networks (CNNs) to glean representations from unlabeled data via self-supervised learning. Following this, we utilize the encoder portion of the AE models to extract relevant features from labeled data, and finetune an MLP-based Position Estimation Model to accurately deduce user locations. Our experimentation on the CTW-2020 dataset, which features a substantial volume of unlabeled data but limited labeled samples, demonstrates the viability of our approach. Notably, the dataset covers a vast area spanning over 646x943x41 meters, and our approach demonstrates promising results even for such expansive localization tasks.
Jamming Modulation: An Active Anti-Jamming Scheme
Sep 05, 2022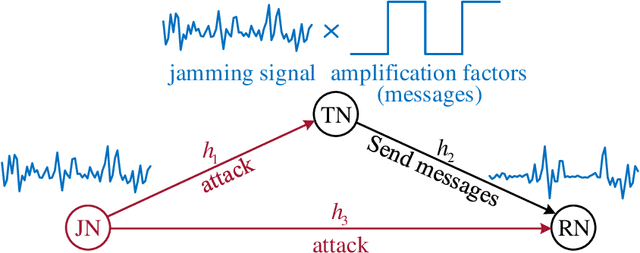
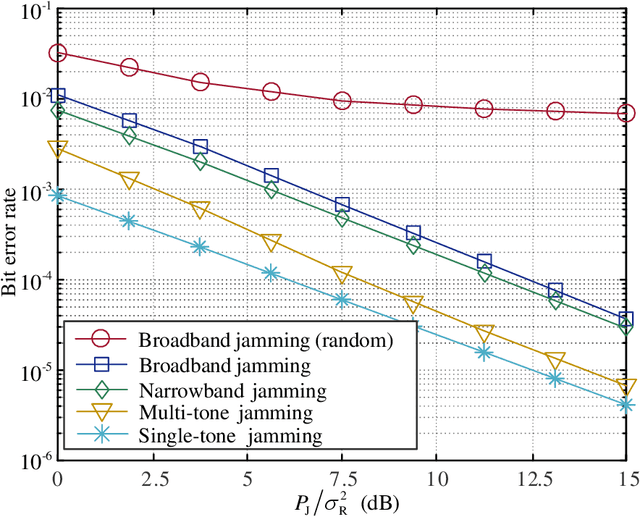
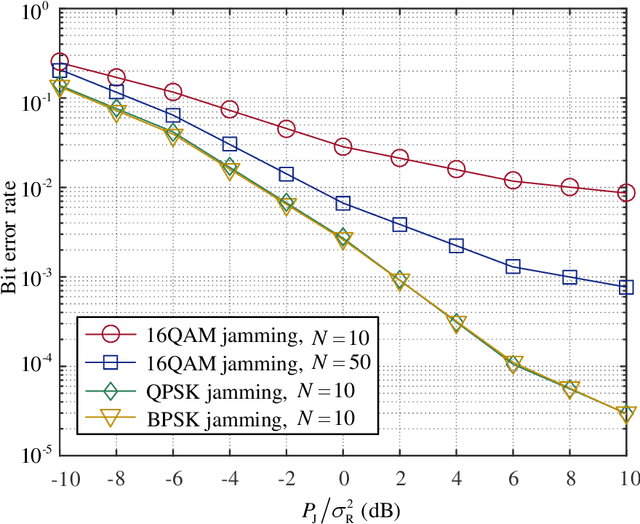
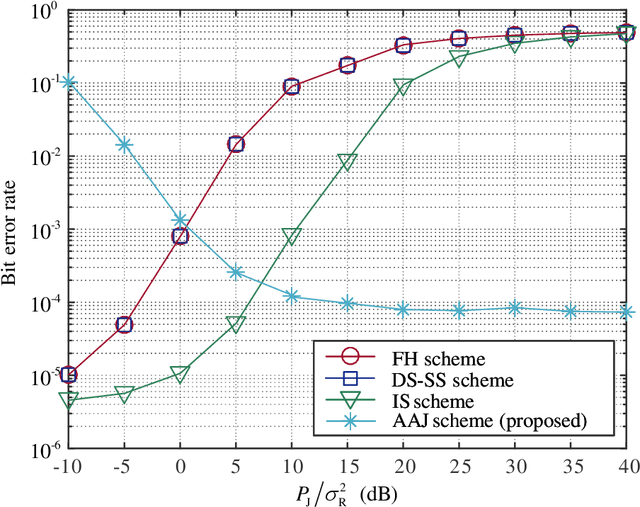
Providing quality communications under adversarial electronic attacks, e.g., broadband jamming attacks, is a challenging task. Unlike state-of-the-art approaches which treat jamming signals as destructive interference, this paper presents a novel active anti-jamming (AAJ) scheme for a jammed channel to enhance the communication quality between a transmitter node (TN) and receiver node (RN), where the TN actively exploits the jamming signal as a carrier to send messages. Specifically, the TN is equipped with a programmable-gain amplifier, which is capable of re-modulating the jamming signals for jamming modulation. Considering four typical jamming types, we derive both the bit error rates (BER) and the corresponding optimal detection thresholds of the AAJ scheme. The asymptotic performances of the AAJ scheme are discussed under the high jamming-to-noise ratio (JNR) and sampling rate cases. Our analysis shows that there exists a BER floor for sufficiently large JNR. Simulation results indicate that the proposed AAJ scheme allows the TN to communicate with the RN reliably even under extremely strong and/or broadband jamming. Additionally, we investigate the channel capacity of the proposed AAJ scheme and show that the channel capacity of the AAJ scheme outperforms that of the direct transmission when the JNR is relatively high.
Smart Traffic Monitoring System using Computer Vision and Edge Computing
Sep 07, 2021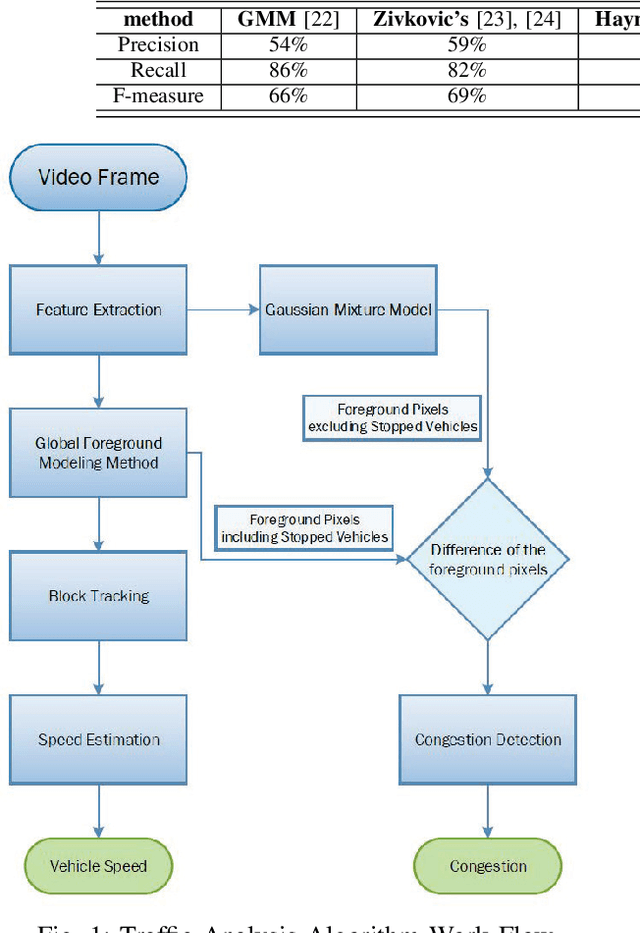
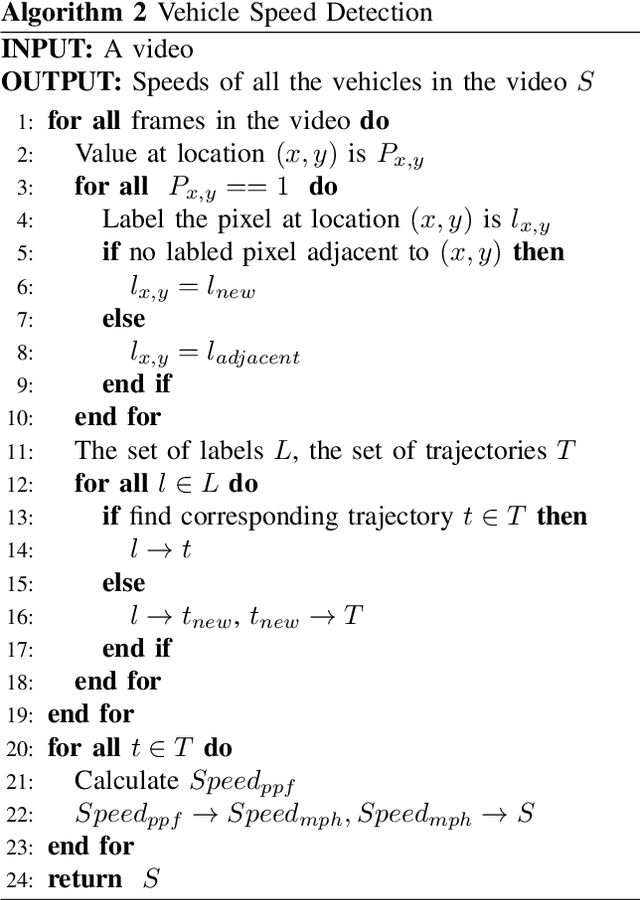
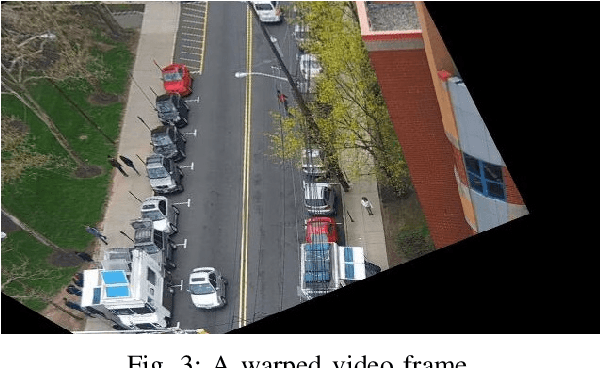
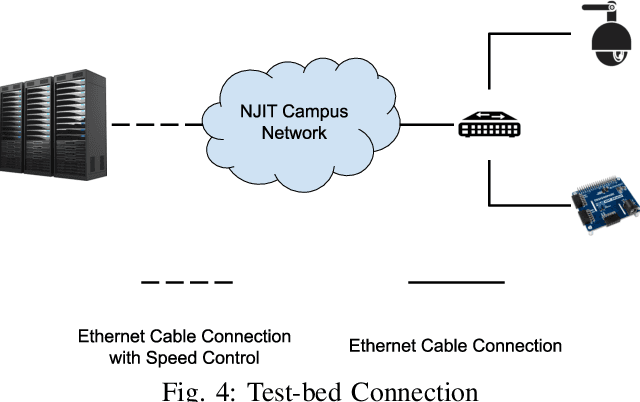
Traffic management systems capture tremendous video data and leverage advances in video processing to detect and monitor traffic incidents. The collected data are traditionally forwarded to the traffic management center (TMC) for in-depth analysis and may thus exacerbate the network paths to the TMC. To alleviate such bottlenecks, we propose to utilize edge computing by equipping edge nodes that are close to cameras with computing resources (e.g. cloudlets). A cloudlet, with limited computing resources as compared to TMC, provides limited video processing capabilities. In this paper, we focus on two common traffic monitoring tasks, congestion detection, and speed detection, and propose a two-tier edge computing based model that takes into account of both the limited computing capability in cloudlets and the unstable network condition to the TMC. Our solution utilizes two algorithms for each task, one implemented at the edge and the other one at the TMC, which are designed with the consideration of different computing resources. While the TMC provides strong computation power, the video quality it receives depends on the underlying network conditions. On the other hand, the edge processes very high-quality video but with limited computing resources. Our model captures this trade-off. We evaluate the performance of the proposed two-tier model as well as the traffic monitoring algorithms via test-bed experiments under different weather as well as network conditions and show that our proposed hybrid edge-cloud solution outperforms both the cloud-only and edge-only solutions.
Machine Learning-based Signal Detection for PMH Signals in Load-modulated MIMO System
Nov 24, 2019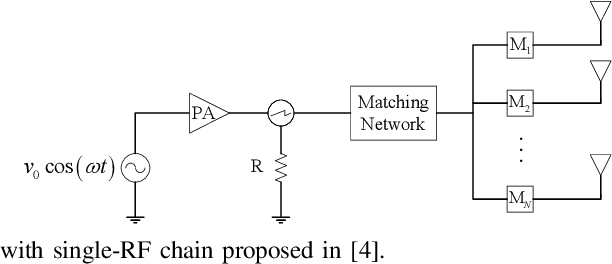
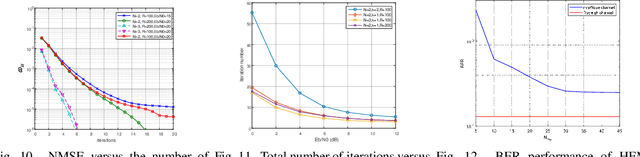
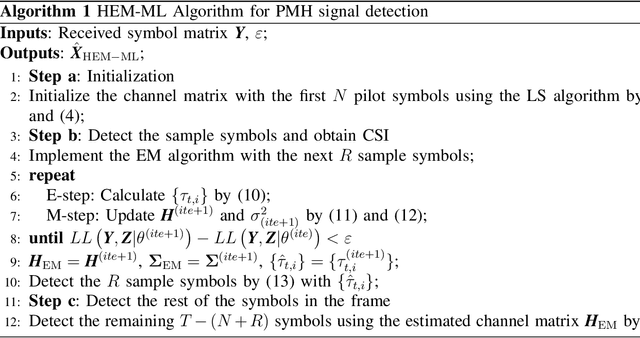
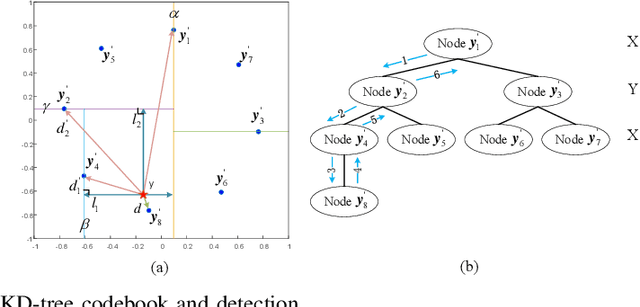
Phase Modulation on the Hypersphere (PMH) is a power efficient modulation scheme for the \textit{load-modulated} multiple-input multiple-output (MIMO) transmitters with central power amplifiers (CPA). However, it is difficult to obtain the precise channel state information (CSI), and the traditional optimal maximum likelihood (ML) detection scheme incurs high complexity which increases exponentially with the number of antennas and the number of bits carried per antenna in the PMH modulation. To detect the PMH signals without knowing the prior CSI, we first propose a signal detection scheme, termed as the hypersphere clustering scheme based on the expectation maximization (EM) algorithm with maximum likelihood detection (HEM-ML). By leveraging machine learning, the proposed detection scheme can accurately obtain information of the channel from a few of the received symbols with little resource cost and achieve comparable detection results as that of the optimal ML detector. To further reduce the computational complexity in the ML detection in HEM-ML, we also propose the second signal detection scheme, termed as the hypersphere clustering scheme based on the EM algorithm with KD-tree detection (HEM-KD). The CSI obtained from the EM algorithm is used to build a spatial KD-tree receiver codebook and the signal detection problem can be transformed into a nearest neighbor search (NNS) problem. The detection complexity of HEM-KD is significantly reduced without any detection performance loss as compared to HEM-ML. Extensive simulation results verify the effectiveness of our proposed detection schemes.
Indoor Localization Using Visible Light Via Fusion Of Multiple Classifiers
Dec 20, 2017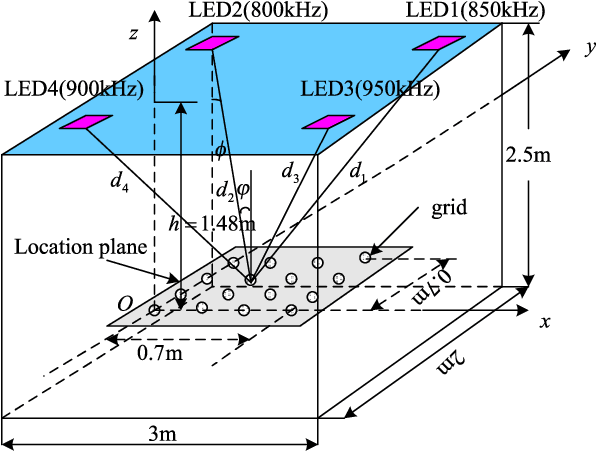
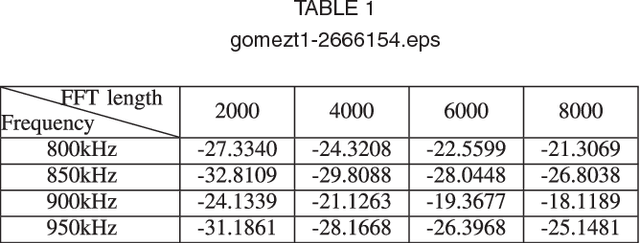
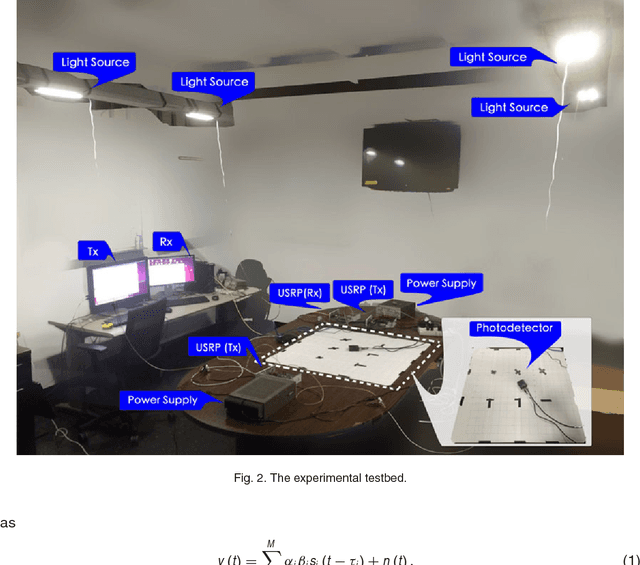

A multiple classifiers fusion localization technique using received signal strengths (RSSs) of visible light is proposed, in which the proposed system transmits different intensity modulated sinusoidal signals by LEDs and the signals received by a Photo Diode (PD) placed at various grid points. First, we obtain some {\emph{approximate}} received signal strengths (RSSs) fingerprints by capturing the peaks of power spectral density (PSD) of the received signals at each given grid point. Unlike the existing RSSs based algorithms, several representative machine learning approaches are adopted to train multiple classifiers based on these RSSs fingerprints. The multiple classifiers localization estimators outperform the classical RSS-based LED localization approaches in accuracy and robustness. To further improve the localization performance, two robust fusion localization algorithms, namely, grid independent least square (GI-LS) and grid dependent least square (GD-LS), are proposed to combine the outputs of these classifiers. We also use a singular value decomposition (SVD) based LS (LS-SVD) method to mitigate the numerical stability problem when the prediction matrix is singular. Experiments conducted on intensity modulated direct detection (IM/DD) systems have demonstrated the effectiveness of the proposed algorithms. The experimental results show that the probability of having mean square positioning error (MSPE) of less than 5cm achieved by GD-LS is improved by 93.03\% and 93.15\%, respectively, as compared to those by the RSS ratio (RSSR) and RSS matching methods with the FFT length of 2000.
Localization by Fusing a Group of Fingerprints via Multiple Antennas in Indoor Environment
Dec 20, 2017



Most existing fingerprints-based indoor localization approaches are based on some single fingerprints, such as received signal strength (RSS), channel impulse response (CIR), and signal subspace. However, the localization accuracy obtained by the single fingerprint approach is rather susceptible to the changing environment, multi-path, and non-line-of-sight (NLOS) propagation. Furthermore, building the fingerprints is a very time consuming process. In this paper, we propose a novel localization framework by Fusing A Group Of fingerprinTs (FAGOT) via multiple antennas for the indoor environment. We first build a GrOup Of Fingerprints (GOOF), which includes five different fingerprints, namely, RSS, covariance matrix, signal subspace, fractional low order moment, and fourth-order cumulant, which are obtained by different transformations of the received signals from multiple antennas in the offline stage. Then, we design a parallel GOOF multiple classifiers based on AdaBoost (GOOF-AdaBoost) to train each of these fingerprints in parallel as five strong multiple classifiers. In the online stage, we input the corresponding transformations of the real measurements into these strong classifiers to obtain independent decisions. Finally, we propose an efficient combination fusion algorithm, namely, MUltiple Classifiers mUltiple Samples (MUCUS) fusion algorithm to improve the accuracy of localization by combining the predictions of multiple classifiers with different samples. As compared with the single fingerprint approaches, the prediction probability of our proposed approach is improved significantly. The process for building fingerprints can also be reduced drastically. We demonstrate the feasibility and performance of the proposed algorithm through extensive simulations as well as via real experimental data using a Universal Software Radio Peripheral (USRP) platform with four antennas.
Indoor Localization by Fusing a Group of Fingerprints Based on Random Forests
Mar 07, 2017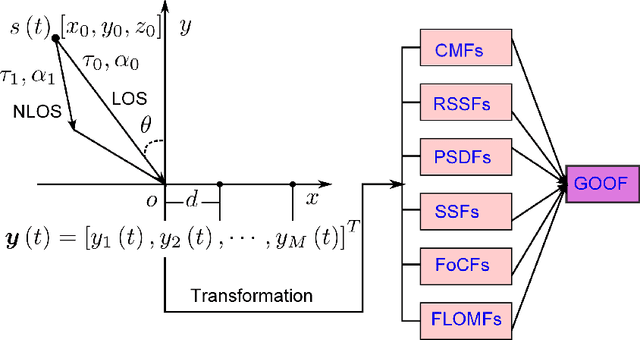
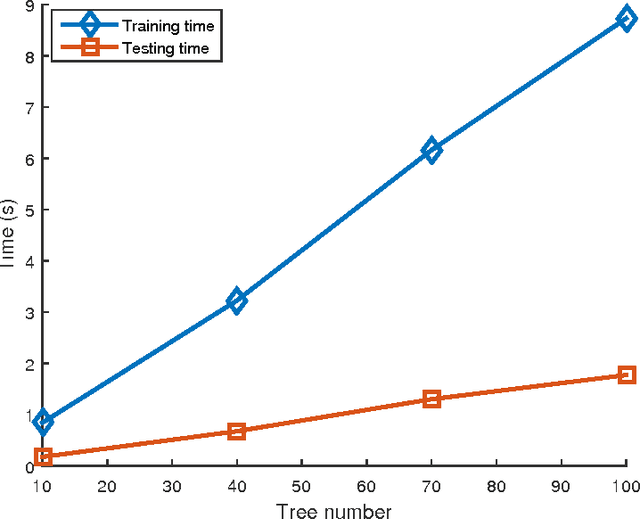
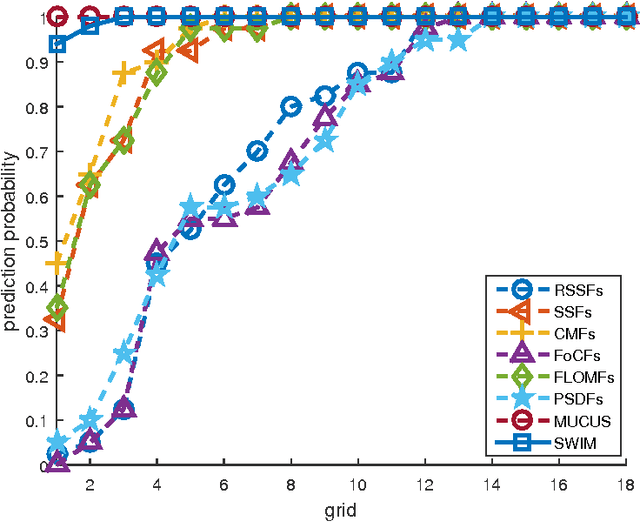
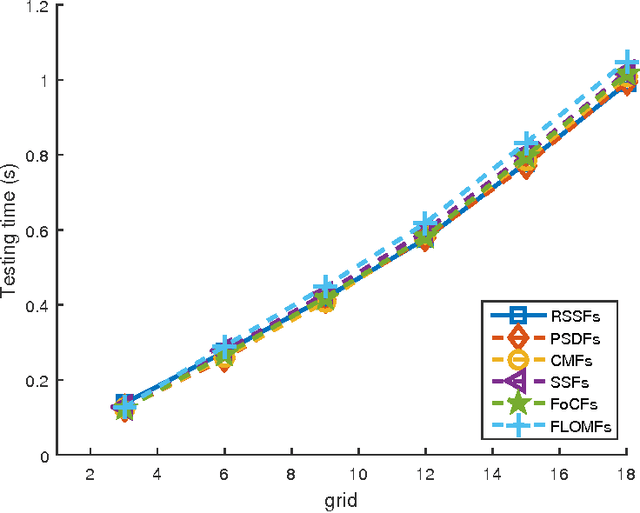
Indoor localization based on SIngle Of Fingerprint (SIOF) is rather susceptible to the changing environment, multipath, and non-line-of-sight (NLOS) propagation. Building SIOF is also a very time-consuming process. Recently, we first proposed a GrOup Of Fingerprints (GOOF) to improve the localization accuracy and reduce the burden of building fingerprints. However, the main drawback is the timeliness. In this paper, we propose a novel localization framework by Fusing A Group Of fingerprinTs (FAGOT) based on random forests. In the offline phase, we first build a GOOF from different transformations of the received signals of multiple antennas. Then, we design multiple GOOF strong classifiers based on Random Forests (GOOF-RF) by training each fingerprint in the GOOF. In the online phase, we input the corresponding transformations of the real measurements into these strong classifiers to obtain multiple independent decisions. Finally, we propose a Sliding Window aIded Mode-based (SWIM) fusion algorithm to balance the localization accuracy and time. Our proposed approaches can work better in an unknown indoor scenario. The burden of building fingerprints can also be reduced drastically. We demonstrate the performance of our algorithms through simulations and real experimental data using two Universal Software Radio Peripheral (USRP) platforms.