 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLANe: Lighting-Aware Neural Fields for Compositional Scene Synthesis
Apr 06, 2023



Neural fields have recently enjoyed great success in representing and rendering 3D scenes. However, most state-of-the-art implicit representations model static or dynamic scenes as a whole, with minor variations. Existing work on learning disentangled world and object neural fields do not consider the problem of composing objects into different world neural fields in a lighting-aware manner. We present Lighting-Aware Neural Field (LANe) for the compositional synthesis of driving scenes in a physically consistent manner. Specifically, we learn a scene representation that disentangles the static background and transient elements into a world-NeRF and class-specific object-NeRFs to allow compositional synthesis of multiple objects in the scene. Furthermore, we explicitly designed both the world and object models to handle lighting variation, which allows us to compose objects into scenes with spatially varying lighting. This is achieved by constructing a light field of the scene and using it in conjunction with a learned shader to modulate the appearance of the object NeRFs. We demonstrate the performance of our model on a synthetic dataset of diverse lighting conditions rendered with the CARLA simulator, as well as a novel real-world dataset of cars collected at different times of the day. Our approach shows that it outperforms state-of-the-art compositional scene synthesis on the challenging dataset setup, via composing object-NeRFs learned from one scene into an entirely different scene whilst still respecting the lighting variations in the novel scene. For more results, please visit our project website https://lane-composition.github.io/.
CLONeR: Camera-Lidar Fusion for Occupancy Grid-aided Neural Representations
Sep 06, 2022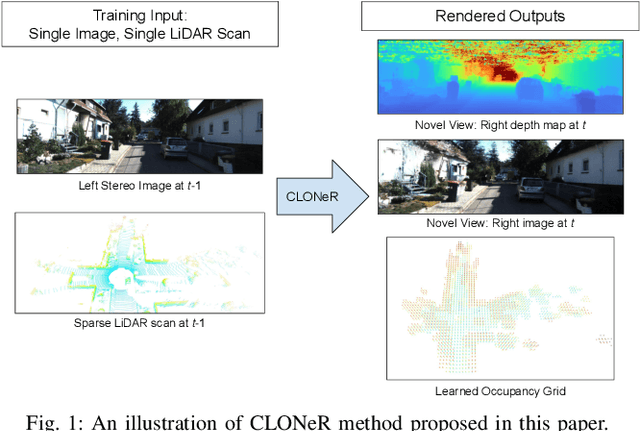

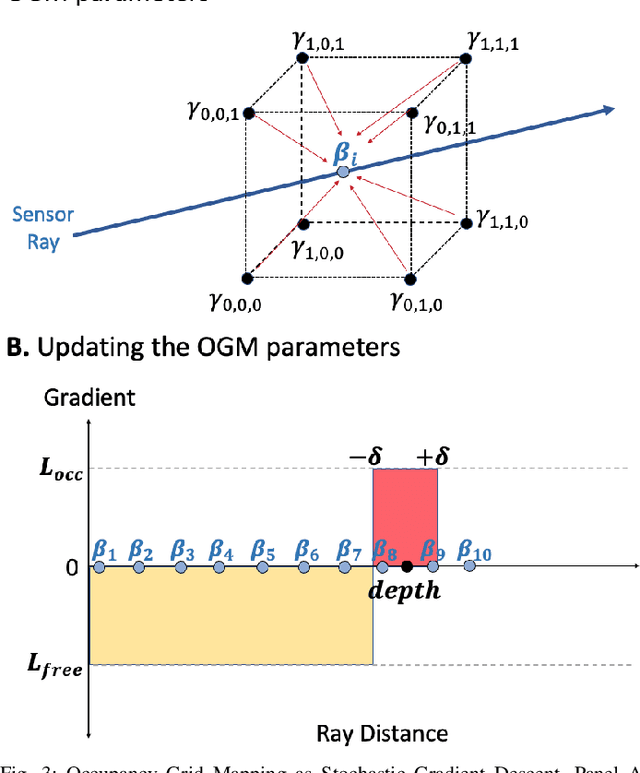
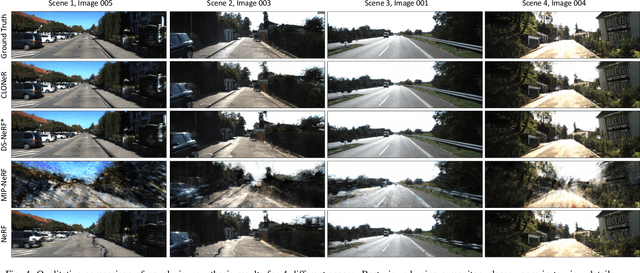
Recent advances in neural radiance fields (NeRFs) achieve state-of-the-art novel view synthesis and facilitate dense estimation of scene properties. However, NeRFs often fail for large, unbounded scenes that are captured under very sparse views with the scene content concentrated far away from the camera, as is typical for field robotics applications. In particular, NeRF-style algorithms perform poorly: (1) when there are insufficient views with little pose diversity, (2) when scenes contain saturation and shadows, and (3) when finely sampling large unbounded scenes with fine structures becomes computationally intensive. This paper proposes CLONeR, which significantly improves upon NeRF by allowing it to model large outdoor driving scenes that are observed from sparse input sensor views. This is achieved by decoupling occupancy and color learning within the NeRF framework into separate Multi-Layer Perceptrons (MLPs) trained using LiDAR and camera data, respectively. In addition, this paper proposes a novel method to build differentiable 3D Occupancy Grid Maps (OGM) alongside the NeRF model, and leverage this occupancy grid for improved sampling of points along a ray for volumetric rendering in metric space. Through extensive quantitative and qualitative experiments on scenes from the KITTI dataset, this paper demonstrates that the proposed method outperforms state-of-the-art NeRF models on both novel view synthesis and dense depth prediction tasks when trained on sparse input data.
SIMBAR: Single Image-Based Scene Relighting For Effective Data Augmentation For Automated Driving Vision Tasks
Apr 01, 2022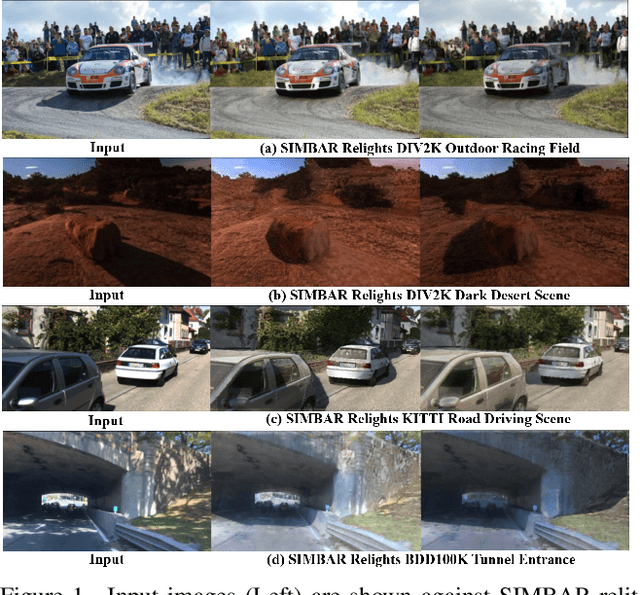
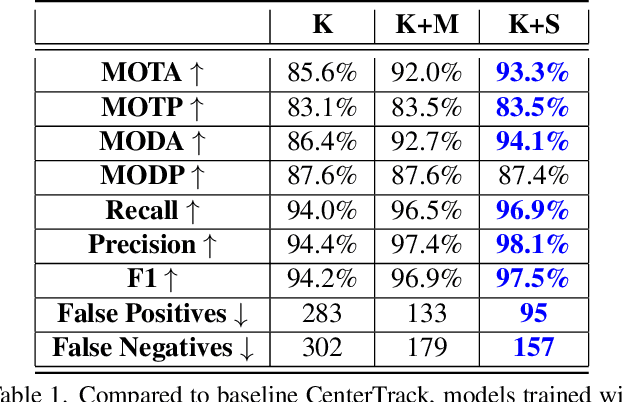
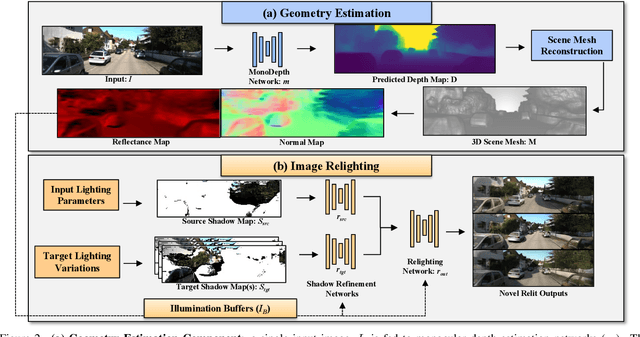
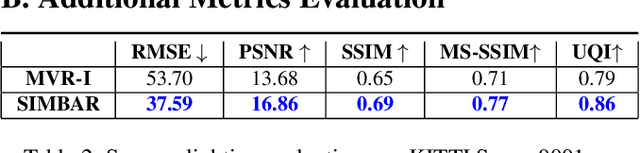
Real-world autonomous driving datasets comprise of images aggregated from different drives on the road. The ability to relight captured scenes to unseen lighting conditions, in a controllable manner, presents an opportunity to augment datasets with a richer variety of lighting conditions, similar to what would be encountered in the real-world. This paper presents a novel image-based relighting pipeline, SIMBAR, that can work with a single image as input. To the best of our knowledge, there is no prior work on scene relighting leveraging explicit geometric representations from a single image. We present qualitative comparisons with prior multi-view scene relighting baselines. To further validate and effectively quantify the benefit of leveraging SIMBAR for data augmentation for automated driving vision tasks, object detection and tracking experiments are conducted with a state-of-the-art method, a Multiple Object Tracking Accuracy (MOTA) of 93.3% is achieved with CenterTrack on SIMBAR-augmented KITTI - an impressive 9.0% relative improvement over the baseline MOTA of 85.6% with CenterTrack on original KITTI, both models trained from scratch and tested on Virtual KITTI. For more details and SIMBAR relit datasets, please visit our project website (https://simbarv1.github.io/).