 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTAM: Torque Adaptation Module for Robust Motion Transfer in Manipulation
Jun 04, 2026A policy tuned for one robot often behaves differently on another, whether due to the sim-to-real gap, unknown payloads, or the differing dynamics of two instances of the same robot. In contact-rich, dynamic manipulation, even small motion discrepancies can result in failure to track reference motion, since they disrupt the timing and modes of contact. Common remedies, such as domain randomization or system identification, either produce overly conservative task policies or require data that must be recollected for each robot or payload. We introduce the Torque Adaptation Module (TAM), a learned module that adapts the torque commands sent to the robot to match the behavior of an ideal robot. TAM operates between the low-level controller that tracks the policy's actions and the robot's torque interface. It includes a history encoder that embeds proprioceptive history into a latent state and a torque adaptor that computes residual torque corrections. Because TAM depends only on proprioceptive history and not on policy observations, or the action space, the same TAM weights can be reused to adapt policies with different action spaces (joint targets, end-effector targets, or direct torques). The policies themselves do not need to be trained with domain randomization of robot parameters. Instead, we offload the need for domain randomization to TAM by training it entirely in randomized simulation, using multi-robot pretraining followed by a robot-specific fine-tuning step that still requires no real-robot data. We evaluate TAM zero-shot on a real Franka Panda robot across dynamic manipulation tasks that include a vision-based box pushing policy (from RL), a flip policy (from BC), and an MPC ball-on-plate balancing. Our experiments show that TAM improves zero-shot real-robot execution compared to online system identification and RMA baselines and enables robust dynamic manipulation performance.
Context-Sensitive Abstractions for Reinforcement Learning with Parameterized Actions
Dec 23, 2025Real-world sequential decision-making often involves parameterized action spaces that require both, decisions regarding discrete actions and decisions about continuous action parameters governing how an action is executed. Existing approaches exhibit severe limitations in this setting -- planning methods demand hand-crafted action models, and standard reinforcement learning (RL) algorithms are designed for either discrete or continuous actions but not both, and the few RL methods that handle parameterized actions typically rely on domain-specific engineering and fail to exploit the latent structure of these spaces. This paper extends the scope of RL algorithms to long-horizon, sparse-reward settings with parameterized actions by enabling agents to autonomously learn both state and action abstractions online. We introduce algorithms that progressively refine these abstractions during learning, increasing fine-grained detail in the critical regions of the state-action space where greater resolution improves performance. Across several continuous-state, parameterized-action domains, our abstraction-driven approach enables TD($λ$) to achieve markedly higher sample efficiency than state-of-the-art baselines.
Beyond Task and Motion Planning: Hierarchical Robot Planning with General-Purpose Policies
Apr 24, 2025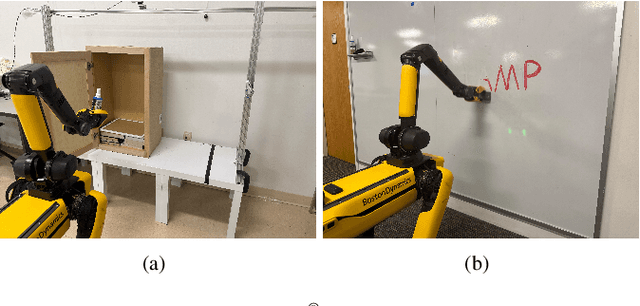
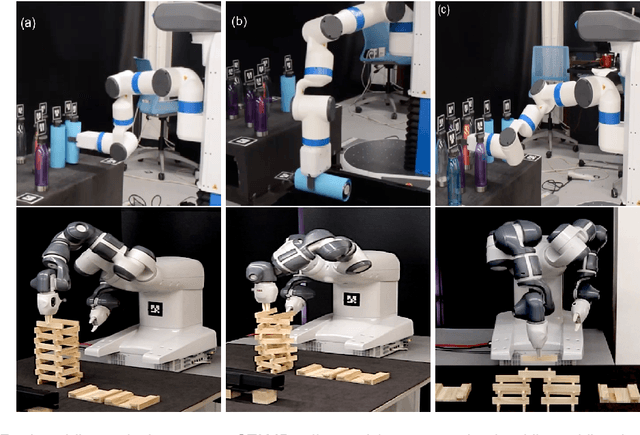
Task and motion planning is a well-established approach for solving long-horizon robot planning problems. However, traditional methods assume that each task-level robot action, or skill, can be reduced to kinematic motion planning. In this work, we address the challenge of planning with both kinematic skills and closed-loop motor controllers that go beyond kinematic considerations. We propose a novel method that integrates these controllers into motion planning using Composable Interaction Primitives (CIPs), enabling the use of diverse, non-composable pre-learned skills in hierarchical robot planning. Toward validating our Task and Skill Planning (TASP) approach, we describe ongoing robot experiments in real-world scenarios designed to demonstrate how CIPs can allow a mobile manipulator robot to effectively combine motion planning with general-purpose skills to accomplish complex tasks.
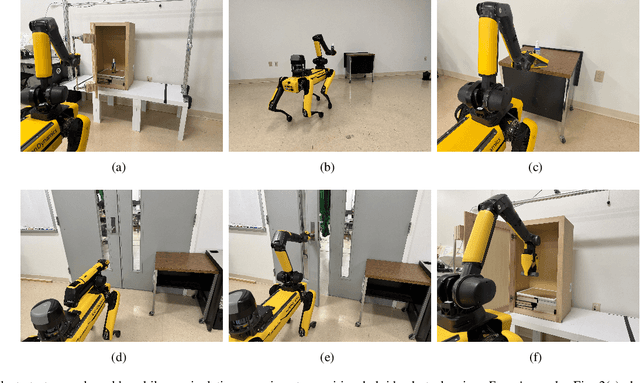
Using Explainable AI and Hierarchical Planning for Outreach with Robots
Mar 31, 2024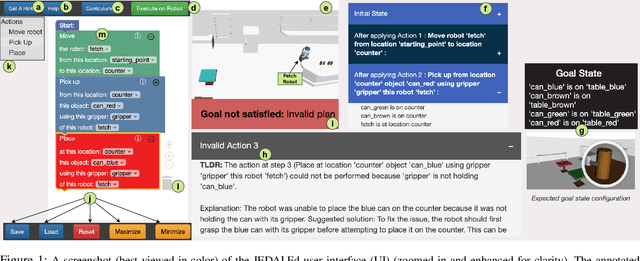
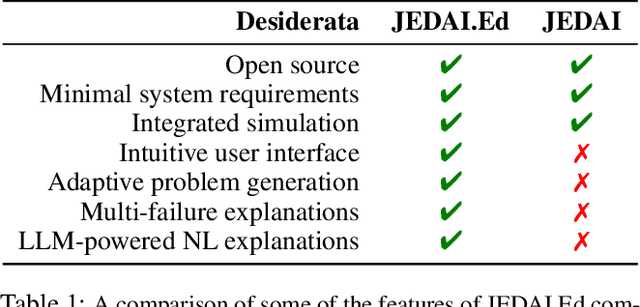
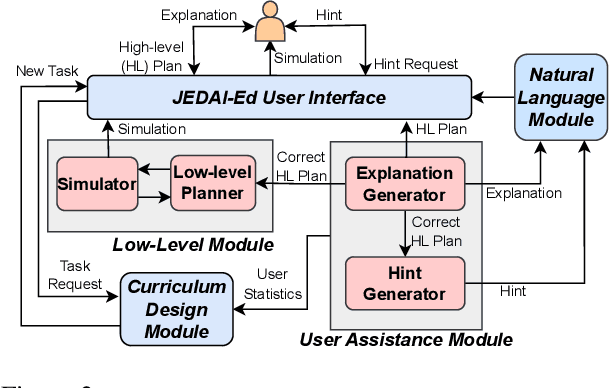
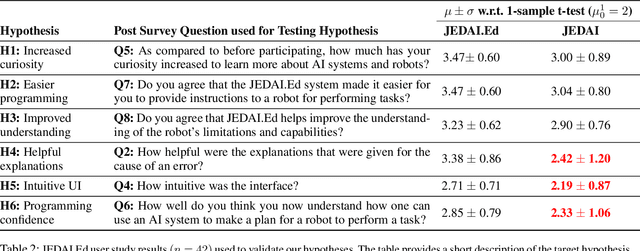
Understanding how robots plan and execute tasks is crucial in today's world, where they are becoming more prevalent in our daily lives. However, teaching non-experts the complexities of robot planning can be challenging. This work presents an open-source platform that simplifies the process using a visual interface that completely abstracts the complex internals of hierarchical planning that robots use for performing task and motion planning. Using the principles developed in the field of explainable AI, this intuitive platform enables users to create plans for robots to complete tasks, and provides helpful hints and natural language explanations for errors. The platform also has a built-in simulator to demonstrate how robots execute submitted plans. This platform's efficacy was tested in a user study on university students with little to no computer science background. Our results show that this platform is highly effective in teaching novice users the intuitions of robot task planning.
From Reals to Logic and Back: Inventing Symbolic Vocabularies, Actions, and Models for Planning from Raw Data
Feb 23, 2024



Hand-crafted, logic-based state and action representations have been widely used to overcome the intractable computational complexity of long-horizon robot planning problems, including task and motion planning problems. However, creating such representations requires experts with strong intuitions and detailed knowledge about the robot and the tasks it may need to accomplish in a given setting. Removing this dependency on human intuition is a highly active research area. This paper presents the first approach for autonomously learning generalizable, logic-based relational representations for abstract states and actions starting from unannotated high-dimensional, real-valued robot trajectories. The learned representations constitute auto-invented PDDL-like domain models. Empirical results in deterministic settings show that powerful abstract representations can be learned from just a handful of robot trajectories; the learned relational representations include but go beyond classical, intuitive notions of high-level actions; and that the learned models allow planning algorithms to scale to tasks that were previously beyond the scope of planning without hand-crafted abstractions.
Multi-Task Option Learning and Discovery for Stochastic Path Planning
Sep 30, 2022

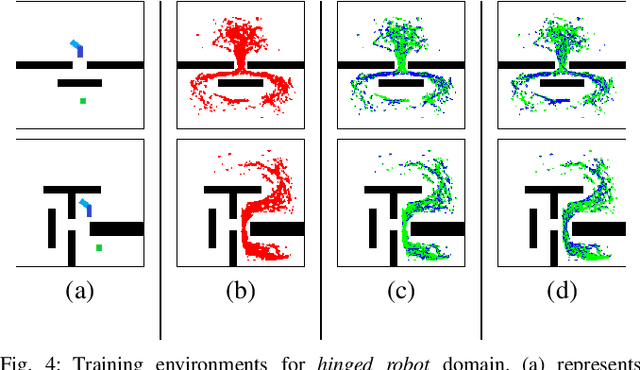
This paper addresses the problem of reliably and efficiently solving broad classes of long-horizon stochastic path planning problems. Starting with a vanilla RL formulation with a stochastic dynamics simulator and an occupancy matrix of the environment, our approach computes useful options with policies as well as high-level paths that compose the discovered options. Our main contributions are (1) data-driven methods for creating abstract states that serve as endpoints for helpful options, (2) methods for computing option policies using auto-generated option guides in the form of dense pseudo-reward functions, and (3) an overarching algorithm for composing the computed options. We show that this approach yields strong guarantees of executability and solvability: under fairly general conditions, the computed option guides lead to composable option policies and consequently ensure downward refinability. Empirical evaluation on a range of robots, environments, and tasks shows that this approach effectively transfers knowledge across related tasks and that it outperforms existing approaches by a significant margin.
Using Deep Learning to Bootstrap Abstractions for Hierarchical Robot Planning
Feb 11, 2022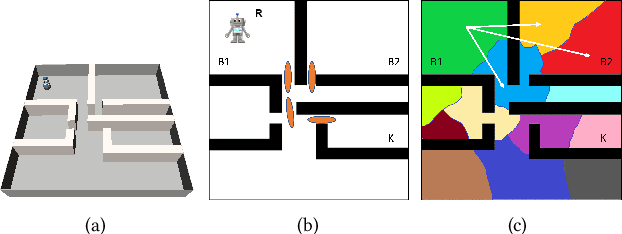
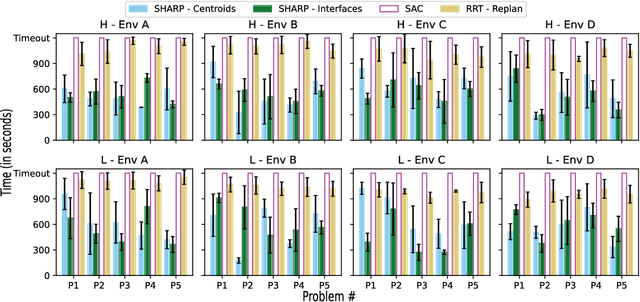
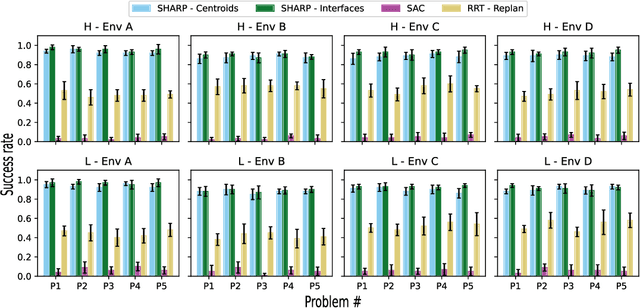
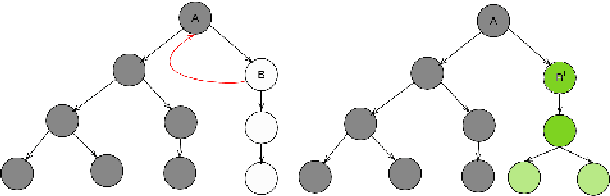
This paper addresses the problem of learning abstractions that boost robot planning performance while providing strong guarantees of reliability. Although state-of-the-art hierarchical robot planning algorithms allow robots to efficiently compute long-horizon motion plans for achieving user desired tasks, these methods typically rely upon environment-dependent state and action abstractions that need to be hand-designed by experts. We present a new approach for bootstrapping the entire hierarchical planning process. This allows us to compute abstract states and actions for new environments automatically using the critical regions predicted by a deep neural network with an auto-generated robot-specific architecture. We show that the learned abstractions can be used with a novel multi-source bi-directional hierarchical robot planning algorithm that is sound and probabilistically complete. An extensive empirical evaluation on twenty different settings using holonomic and non-holonomic robots shows that (a) our learned abstractions provide the information necessary for efficient multi-source hierarchical planning; and that (b) this approach of learning, abstractions, and planning outperforms state-of-the-art baselines by nearly a factor of ten in terms of planning time on test environments not seen during training.
JEDAI Explains Decision-Making AI
Oct 31, 2021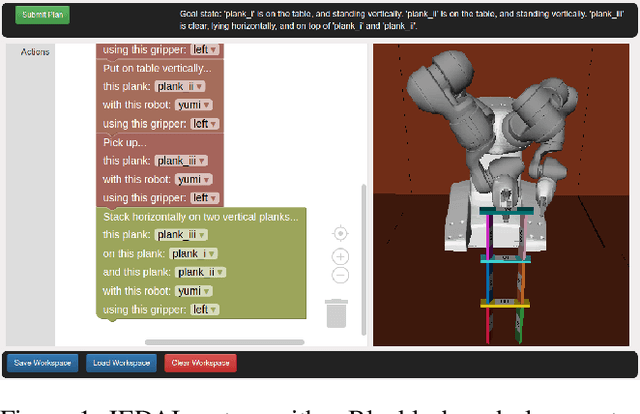
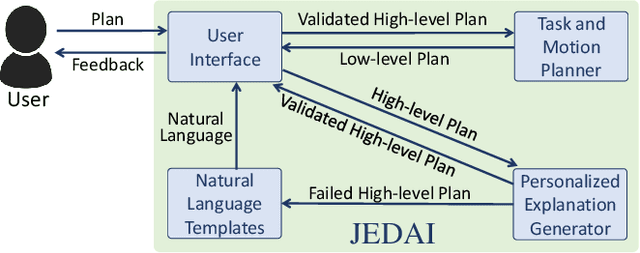
This paper presents JEDAI, an AI system designed for outreach and educational efforts aimed at non-AI experts. JEDAI features a novel synthesis of research ideas from integrated task and motion planning and explainable AI. JEDAI helps users create high-level, intuitive plans while ensuring that they will be executable by the robot. It also provides users customized explanations about errors and helps improve their understanding of AI planning as well as the limits and capabilities of the underlying robot system.
Anytime Stochastic Task and Motion Policies
Aug 28, 2021
In order to solve complex, long-horizon tasks, intelligent robots need to carry out high-level, abstract planning and reasoning in conjunction with motion planning. However, abstract models are typically lossy and plans or policies computed using them can be inexecutable. These problems are exacerbated in stochastic situations where the robot needs to reason about and plan for multiple contingencies. We present a new approach for integrated task and motion planning in stochastic settings. In contrast to prior work in this direction, we show that our approach can effectively compute integrated task and motion policies whose branching structures encode agent behaviors that handle multiple execution-time contingencies. We prove that our algorithm is probabilistically complete and can compute feasible solution policies in an anytime fashion so that the probability of encountering an unresolved contingency decreases over time. Empirical results on a set of challenging problems show the utility and scope of our method.
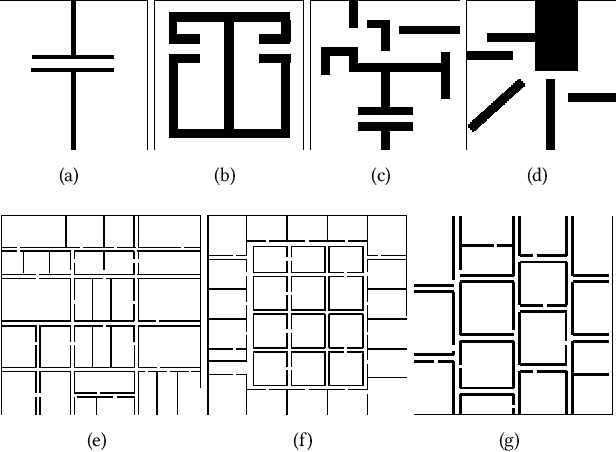
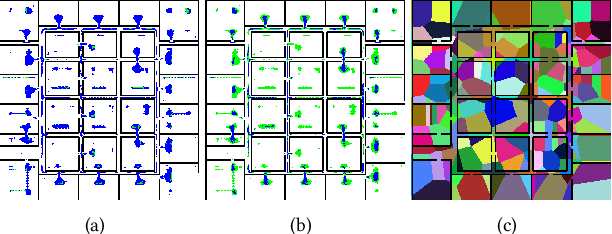
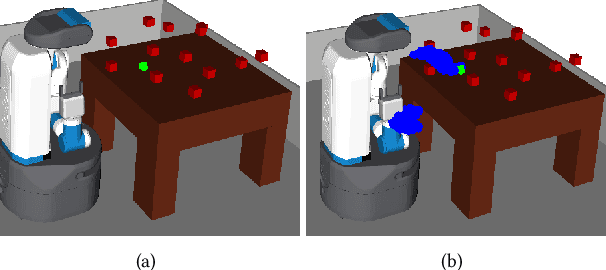
Learning Sampling Distributions for Efficient High-Dimensional Motion Planning
Dec 01, 2020
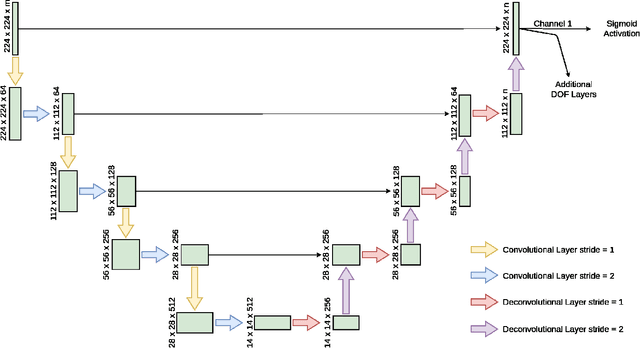

Robot motion planning involves computing a sequence of valid robot configurations that take the robot from its initial state to a goal state. Solving a motion planning problem optimally using analytical methods is proven to be PSPACE-Hard. Sampling-based approaches have tried to approximate the optimal solution efficiently. Generally, sampling-based planners use uniform samplers to cover the entire state space. In this paper, we propose a deep-learning-based framework that identifies robot configurations in the environment that are important to solve the given motion planning problem. These states are used to bias the sampling distribution in order to reduce the planning time. Our approach works with a unified network and generates domain-dependent network parameters based on the environment and the robot. We evaluate our approach with Learn and Link planner in three different settings. Results show significant improvement in motion planning times when compared with current sampling-based motion planners.