 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Explainable AI and Hierarchical Planning for Outreach with Robots
Paper and Code
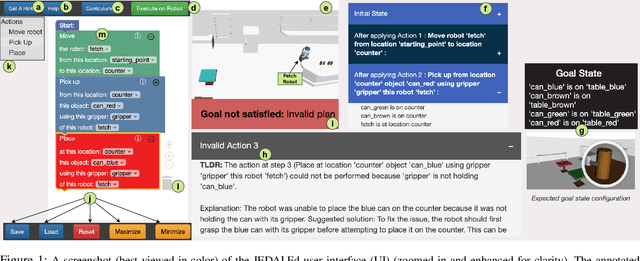
Understanding how robots plan and execute tasks is crucial in today's world, where they are becoming more prevalent in our daily lives. However, teaching non-experts the complexities of robot planning can be challenging. This work presents an open-source platform that simplifies the process using a visual interface that completely abstracts the complex internals of hierarchical planning that robots use for performing task and motion planning. Using the principles developed in the field of explainable AI, this intuitive platform enables users to create plans for robots to complete tasks, and provides helpful hints and natural language explanations for errors. The platform also has a built-in simulator to demonstrate how robots execute submitted plans. This platform's efficacy was tested in a user study on university students with little to no computer science background. Our results show that this platform is highly effective in teaching novice users the intuitions of robot task planning.