 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Explainable AI and Hierarchical Planning for Outreach with Robots
Mar 31, 2024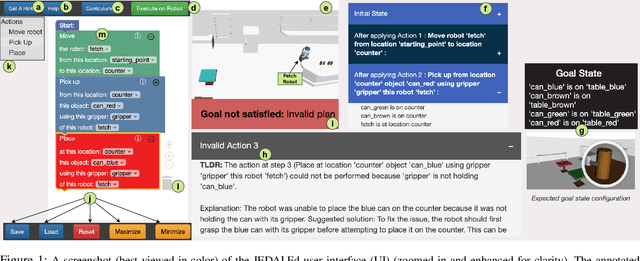
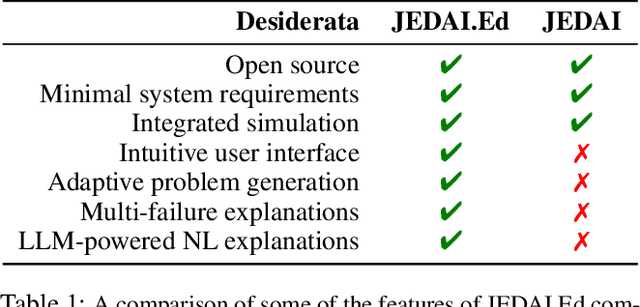
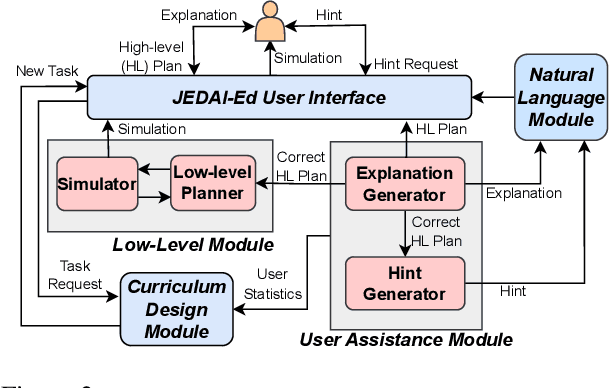
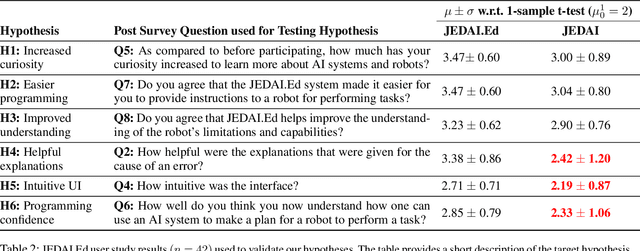
Understanding how robots plan and execute tasks is crucial in today's world, where they are becoming more prevalent in our daily lives. However, teaching non-experts the complexities of robot planning can be challenging. This work presents an open-source platform that simplifies the process using a visual interface that completely abstracts the complex internals of hierarchical planning that robots use for performing task and motion planning. Using the principles developed in the field of explainable AI, this intuitive platform enables users to create plans for robots to complete tasks, and provides helpful hints and natural language explanations for errors. The platform also has a built-in simulator to demonstrate how robots execute submitted plans. This platform's efficacy was tested in a user study on university students with little to no computer science background. Our results show that this platform is highly effective in teaching novice users the intuitions of robot task planning.
From Reals to Logic and Back: Inventing Symbolic Vocabularies, Actions, and Models for Planning from Raw Data
Feb 23, 2024



Hand-crafted, logic-based state and action representations have been widely used to overcome the intractable computational complexity of long-horizon robot planning problems, including task and motion planning problems. However, creating such representations requires experts with strong intuitions and detailed knowledge about the robot and the tasks it may need to accomplish in a given setting. Removing this dependency on human intuition is a highly active research area. This paper presents the first approach for autonomously learning generalizable, logic-based relational representations for abstract states and actions starting from unannotated high-dimensional, real-valued robot trajectories. The learned representations constitute auto-invented PDDL-like domain models. Empirical results in deterministic settings show that powerful abstract representations can be learned from just a handful of robot trajectories; the learned relational representations include but go beyond classical, intuitive notions of high-level actions; and that the learned models allow planning algorithms to scale to tasks that were previously beyond the scope of planning without hand-crafted abstractions.