 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Evaluation of Multiple Sclerosis (MS) Lesion Segmentation Models
May 10, 2026Multiple Sclerosis (MS) is a chronic autoimmune disease that can significantly reduce the quality of life of a patient. Existing treatment options can only help slow down the progression of the disease. Therefore, early detection and precise monitoring of disease progression are important. Deep learning offers state-of-the-art models for detecting and segmenting MS lesions in brain MRI scans. However, most of these models are evaluated using the Dice score, without accounting for lesion-wise detection and segmentation performance or other metrics that quantify model performance in cases that are complex or confusing for human annotators, or in cases that are essential for disease detection and progression monitoring. In this paper, we highlight the need to rethink the evaluation of MS lesion segmentation models. In this context, we first present problem fingerprinting in detail to highlight what neurologists look for in brain MRI scans for MS detection and progression monitoring, and which metrics are required to properly quantify model performance in these contexts. Additionally, we present an analysis of state-of-the-art models on two open-source datasets using these metrics to highlight their usability for real-world deployment in hospitals.
PatchBlock: A Lightweight Defense Against Adversarial Patches for Embedded EdgeAI Devices
Jan 01, 2026Adversarial attacks pose a significant challenge to the reliable deployment of machine learning models in EdgeAI applications, such as autonomous driving and surveillance, which rely on resource-constrained devices for real-time inference. Among these, patch-based adversarial attacks, where small malicious patches (e.g., stickers) are applied to objects, can deceive neural networks into making incorrect predictions with potentially severe consequences. In this paper, we present PatchBlock, a lightweight framework designed to detect and neutralize adversarial patches in images. Leveraging outlier detection and dimensionality reduction, PatchBlock identifies regions affected by adversarial noise and suppresses their impact. It operates as a pre-processing module at the sensor level, efficiently running on CPUs in parallel with GPU inference, thus preserving system throughput while avoiding additional GPU overhead. The framework follows a three-stage pipeline: splitting the input into chunks (Chunking), detecting anomalous regions via a redesigned isolation forest with targeted cuts for faster convergence (Separating), and applying dimensionality reduction on the identified outliers (Mitigating). PatchBlock is both model- and patch-agnostic, can be retrofitted to existing pipelines, and integrates seamlessly between sensor inputs and downstream models. Evaluations across multiple neural architectures, benchmark datasets, attack types, and diverse edge devices demonstrate that PatchBlock consistently improves robustness, recovering up to 77% of model accuracy under strong patch attacks such as the Google Adversarial Patch, while maintaining high portability and minimal clean accuracy loss. Additionally, PatchBlock outperforms the state-of-the-art defenses in efficiency, in terms of computation time and energy consumption per sample, making it suitable for EdgeAI applications.
DECADE: Towards Designing Efficient-yet-Accurate Distance Estimation Modules for Collision Avoidance in Mobile Advanced Driver Assistance Systems
Oct 25, 2024



The proliferation of smartphones and other mobile devices provides a unique opportunity to make Advanced Driver Assistance Systems (ADAS) accessible to everyone in the form of an application empowered by low-cost Machine/Deep Learning (ML/DL) models to enhance road safety. For the critical feature of Collision Avoidance in Mobile ADAS, lightweight Deep Neural Networks (DNN) for object detection exist, but conventional pixel-wise depth/distance estimation DNNs are vastly more computationally expensive making them unsuitable for a real-time application on resource-constrained devices. In this paper, we present a distance estimation model, DECADE, that processes each detector output instead of constructing pixel-wise depth/disparity maps. In it, we propose a pose estimation DNN to estimate allocentric orientation of detections to supplement the distance estimation DNN in its prediction of distance using bounding box features. We demonstrate that these modules can be attached to any detector to extend object detection with fast distance estimation. Evaluation of the proposed modules with attachment to and fine-tuning on the outputs of the YOLO object detector on the KITTI 3D Object Detection dataset achieves state-of-the-art performance with 1.38 meters in Mean Absolute Error and 7.3% in Mean Relative Error in the distance range of 0-150 meters. Our extensive evaluation scheme not only evaluates class-wise performance, but also evaluates range-wise accuracy especially in the critical range of 0-70m.
SPAQ-DL-SLAM: Towards Optimizing Deep Learning-based SLAM for Resource-Constrained Embedded Platforms
Sep 22, 2024



Optimizing Deep Learning-based Simultaneous Localization and Mapping (DL-SLAM) algorithms is essential for efficient implementation on resource-constrained embedded platforms, enabling real-time on-board computation in autonomous mobile robots. This paper presents SPAQ-DL-SLAM, a framework that strategically applies Structured Pruning and Quantization (SPAQ) to the architecture of one of the state-ofthe-art DL-SLAM algorithms, DROID-SLAM, for resource and energy-efficiency. Specifically, we perform structured pruning with fine-tuning based on layer-wise sensitivity analysis followed by 8-bit post-training static quantization (PTQ) on the deep learning modules within DROID-SLAM. Our SPAQ-DROIDSLAM model, optimized version of DROID-SLAM model using our SPAQ-DL-SLAM framework with 20% structured pruning and 8-bit PTQ, achieves an 18.9% reduction in FLOPs and a 79.8% reduction in overall model size compared to the DROID-SLAM model. Our evaluations on the TUM-RGBD benchmark shows that SPAQ-DROID-SLAM model surpasses the DROID-SLAM model by an average of 10.5% on absolute trajectory error (ATE) metric. Additionally, our results on the ETH3D SLAM training benchmark demonstrate enhanced generalization capabilities of the SPAQ-DROID-SLAM model, seen by a higher Area Under the Curve (AUC) score and success in 2 additional data sequences compared to the DROIDSLAM model. Despite these improvements, the model exhibits performance variance on the distinct Vicon Room sequences from the EuRoC dataset, which are captured at high angular velocities. This varying performance at some distinct scenarios suggests that designing DL-SLAM algorithms taking operating environments and tasks in consideration can achieve optimal performance and resource efficiency for deployment in resource-constrained embedded platforms.
PENDRAM: Enabling High-Performance and Energy-Efficient Processing of Deep Neural Networks through a Generalized DRAM Data Mapping Policy
Aug 05, 2024



Convolutional Neural Networks (CNNs), a prominent type of Deep Neural Networks (DNNs), have emerged as a state-of-the-art solution for solving machine learning tasks. To improve the performance and energy efficiency of CNN inference, the employment of specialized hardware accelerators is prevalent. However, CNN accelerators still face performance- and energy-efficiency challenges due to high off-chip memory (DRAM) access latency and energy, which are especially crucial for latency- and energy-constrained embedded applications. Moreover, different DRAM architectures have different profiles of access latency and energy, thus making it challenging to optimize them for high performance and energy-efficient CNN accelerators. To address this, we present PENDRAM, a novel design space exploration methodology that enables high-performance and energy-efficient CNN acceleration through a generalized DRAM data mapping policy. Specifically, it explores the impact of different DRAM data mapping policies and DRAM architectures across different CNN partitioning and scheduling schemes on the DRAM access latency and energy, then identifies the pareto-optimal design choices. The experimental results show that our DRAM data mapping policy improves the energy-delay-product of DRAM accesses in the CNN accelerator over other mapping policies by up to 96%. In this manner, our PENDRAM methodology offers high-performance and energy-efficient CNN acceleration under any given DRAM architectures for diverse embedded AI applications.
Robust ADAS: Enhancing Robustness of Machine Learning-based Advanced Driver Assistance Systems for Adverse Weather
Jul 02, 2024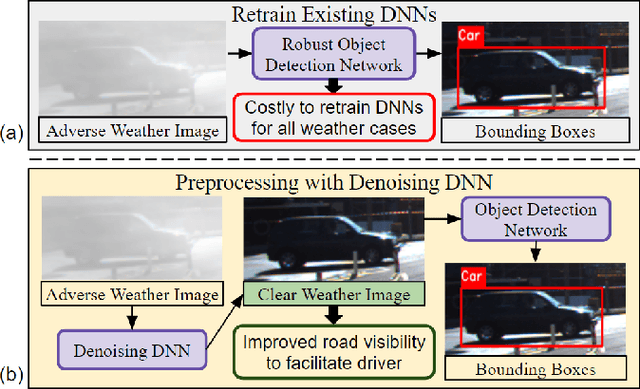
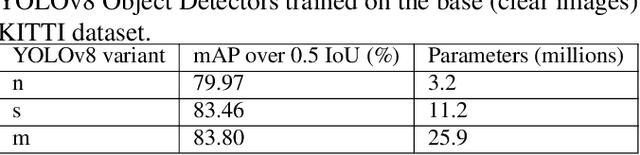
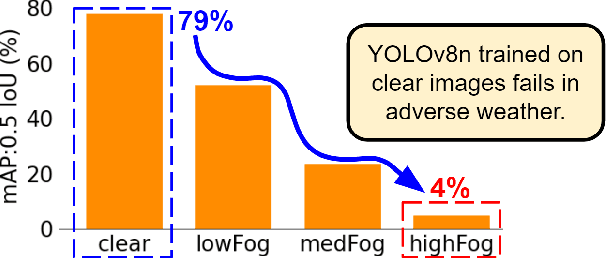
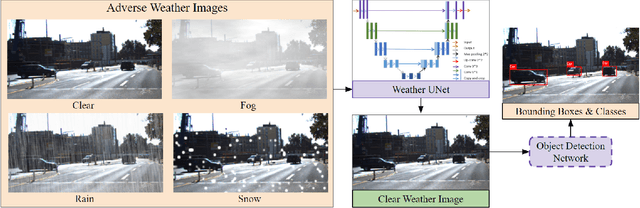
In the realm of deploying Machine Learning-based Advanced Driver Assistance Systems (ML-ADAS) into real-world scenarios, adverse weather conditions pose a significant challenge. Conventional ML models trained on clear weather data falter when faced with scenarios like extreme fog or heavy rain, potentially leading to accidents and safety hazards. This paper addresses this issue by proposing a novel approach: employing a Denoising Deep Neural Network as a preprocessing step to transform adverse weather images into clear weather images, thereby enhancing the robustness of ML-ADAS systems. The proposed method eliminates the need for retraining all subsequent Depp Neural Networks (DNN) in the ML-ADAS pipeline, thus saving computational resources and time. Moreover, it improves driver visualization, which is critical for safe navigation in adverse weather conditions. By leveraging the UNet architecture trained on an augmented KITTI dataset with synthetic adverse weather images, we develop the Weather UNet (WUNet) DNN to remove weather artifacts. Our study demonstrates substantial performance improvements in object detection with WUNet preprocessing under adverse weather conditions. Notably, in scenarios involving extreme fog, our proposed solution improves the mean Average Precision (mAP) score of the YOLOv8n from 4% to 70%.
Examining Changes in Internal Representations of Continual Learning Models Through Tensor Decomposition
May 06, 2024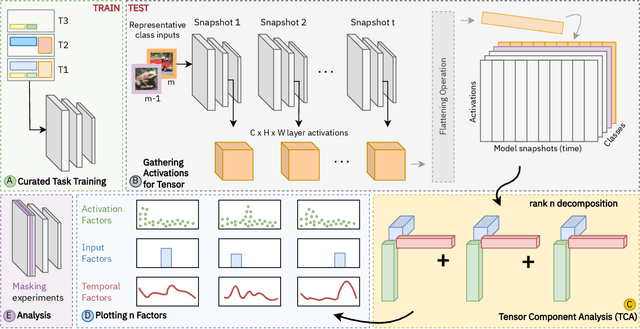
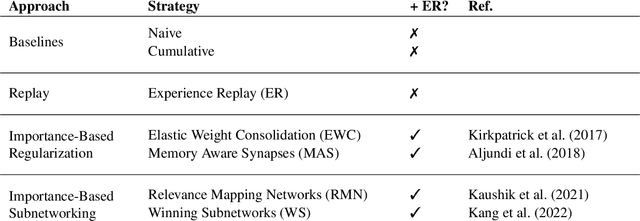
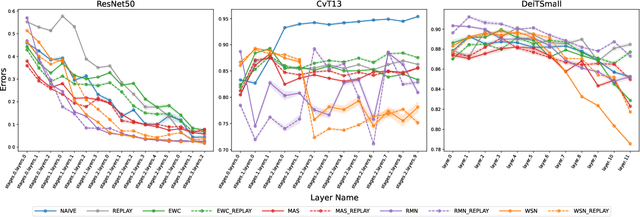
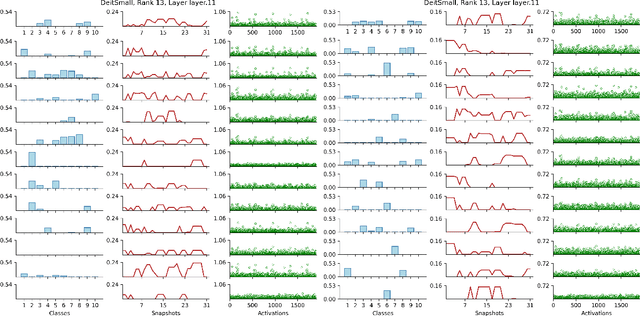
Continual learning (CL) has spurred the development of several methods aimed at consolidating previous knowledge across sequential learning. Yet, the evaluations of these methods have primarily focused on the final output, such as changes in the accuracy of predicted classes, overlooking the issue of representational forgetting within the model. In this paper, we propose a novel representation-based evaluation framework for CL models. This approach involves gathering internal representations from throughout the continual learning process and formulating three-dimensional tensors. The tensors are formed by stacking representations, such as layer activations, generated from several inputs and model `snapshots', throughout the learning process. By conducting tensor component analysis (TCA), we aim to uncover meaningful patterns about how the internal representations evolve, expecting to highlight the merits or shortcomings of examined CL strategies. We conduct our analyses across different model architectures and importance-based continual learning strategies, with a curated task selection. While the results of our approach mirror the difference in performance of various CL strategies, we found that our methodology did not directly highlight specialized clusters of neurons, nor provide an immediate understanding the evolution of filters. We believe a scaled down version of our approach will provide insight into the benefits and pitfalls of using TCA to study continual learning dynamics.
SSAP: A Shape-Sensitive Adversarial Patch for Comprehensive Disruption of Monocular Depth Estimation in Autonomous Navigation Applications
Mar 18, 2024



Monocular depth estimation (MDE) has advanced significantly, primarily through the integration of convolutional neural networks (CNNs) and more recently, Transformers. However, concerns about their susceptibility to adversarial attacks have emerged, especially in safety-critical domains like autonomous driving and robotic navigation. Existing approaches for assessing CNN-based depth prediction methods have fallen short in inducing comprehensive disruptions to the vision system, often limited to specific local areas. In this paper, we introduce SSAP (Shape-Sensitive Adversarial Patch), a novel approach designed to comprehensively disrupt monocular depth estimation (MDE) in autonomous navigation applications. Our patch is crafted to selectively undermine MDE in two distinct ways: by distorting estimated distances or by creating the illusion of an object disappearing from the system's perspective. Notably, our patch is shape-sensitive, meaning it considers the specific shape and scale of the target object, thereby extending its influence beyond immediate proximity. Furthermore, our patch is trained to effectively address different scales and distances from the camera. Experimental results demonstrate that our approach induces a mean depth estimation error surpassing 0.5, impacting up to 99% of the targeted region for CNN-based MDE models. Additionally, we investigate the vulnerability of Transformer-based MDE models to patch-based attacks, revealing that SSAP yields a significant error of 0.59 and exerts substantial influence over 99% of the target region on these models.
MedAide: Leveraging Large Language Models for On-Premise Medical Assistance on Edge Devices
Feb 28, 2024Large language models (LLMs) are revolutionizing various domains with their remarkable natural language processing (NLP) abilities. However, deploying LLMs in resource-constrained edge computing and embedded systems presents significant challenges. Another challenge lies in delivering medical assistance in remote areas with limited healthcare facilities and infrastructure. To address this, we introduce MedAide, an on-premise healthcare chatbot. It leverages tiny-LLMs integrated with LangChain, providing efficient edge-based preliminary medical diagnostics and support. MedAide employs model optimizations for minimal memory footprint and latency on embedded edge devices without server infrastructure. The training process is optimized using low-rank adaptation (LoRA). Additionally, the model is trained on diverse medical datasets, employing reinforcement learning from human feedback (RLHF) to enhance its domain-specific capabilities. The system is implemented on various consumer GPUs and Nvidia Jetson development board. MedAide achieves 77\% accuracy in medical consultations and scores 56 in USMLE benchmark, enabling an energy-efficient healthcare assistance platform that alleviates privacy concerns due to edge-based deployment, thereby empowering the community.
ODDR: Outlier Detection & Dimension Reduction Based Defense Against Adversarial Patches
Nov 20, 2023



Adversarial attacks are a major deterrent towards the reliable use of machine learning models. A powerful type of adversarial attacks is the patch-based attack, wherein the adversarial perturbations modify localized patches or specific areas within the images to deceive the trained machine learning model. In this paper, we introduce Outlier Detection and Dimension Reduction (ODDR), a holistic defense mechanism designed to effectively mitigate patch-based adversarial attacks. In our approach, we posit that input features corresponding to adversarial patches, whether naturalistic or otherwise, deviate from the inherent distribution of the remaining image sample and can be identified as outliers or anomalies. ODDR employs a three-stage pipeline: Fragmentation, Segregation, and Neutralization, providing a model-agnostic solution applicable to both image classification and object detection tasks. The Fragmentation stage parses the samples into chunks for the subsequent Segregation process. Here, outlier detection techniques identify and segregate the anomalous features associated with adversarial perturbations. The Neutralization stage utilizes dimension reduction methods on the outliers to mitigate the impact of adversarial perturbations without sacrificing pertinent information necessary for the machine learning task. Extensive testing on benchmark datasets and state-of-the-art adversarial patches demonstrates the effectiveness of ODDR. Results indicate robust accuracies matching and lying within a small range of clean accuracies (1%-3% for classification and 3%-5% for object detection), with only a marginal compromise of 1%-2% in performance on clean samples, thereby significantly outperforming other defenses.