 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActionNex: A Virtual Outage Manager for Cloud
Apr 03, 2026Outage management in large-scale cloud operations remains heavily manual, requiring rapid triage, cross-team coordination, and experience-driven decisions under partial observability. We present \textbf{ActionNex}, a production-grade agentic system that supports end-to-end outage assistance, including real-time updates, knowledge distillation, and role- and stage-conditioned next-best action recommendations. ActionNex ingests multimodal operational signals (e.g., outage content, telemetry, and human communications) and compresses them into critical events that represent meaningful state transitions. It couples this perception layer with a hierarchical memory subsystem: long-term Key-Condition-Action (KCA) knowledge distilled from playbooks and historical executions, episodic memory of prior outages, and working memory of the live context. A reasoning agent aligns current critical events to preconditions, retrieves relevant memories, and generates actionable recommendations; executed human actions serve as an implicit feedback signal to enable continual self-evolution in a human-agent hybrid system. We evaluate ActionNex on eight real Azure outages (8M tokens, 4,000 critical events) using two complementary ground-truth action sets, achieving 71.4\% precision and 52.8-54.8\% recall. The system has been piloted in production and has received positive early feedback.
ApproBiVT: Lead ASR Models to Generalize Better Using Approximated Bias-Variance Tradeoff Guided Early Stopping and Checkpoint Averaging
Aug 05, 2023
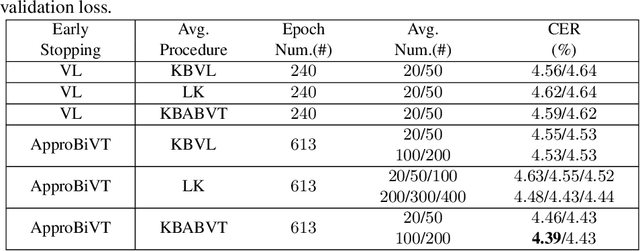

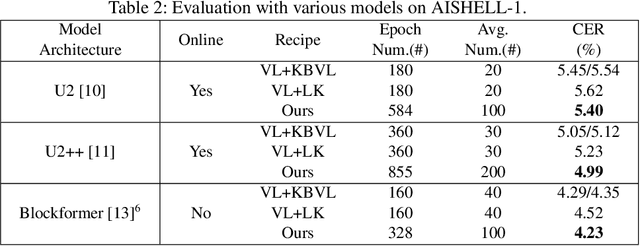
The conventional recipe for Automatic Speech Recognition (ASR) models is to 1) train multiple checkpoints on a training set while relying on a validation set to prevent overfitting using early stopping and 2) average several last checkpoints or that of the lowest validation losses to obtain the final model. In this paper, we rethink and update the early stopping and checkpoint averaging from the perspective of the bias-variance tradeoff. Theoretically, the bias and variance represent the fitness and variability of a model and the tradeoff of them determines the overall generalization error. But, it's impractical to evaluate them precisely. As an alternative, we take the training loss and validation loss as proxies of bias and variance and guide the early stopping and checkpoint averaging using their tradeoff, namely an Approximated Bias-Variance Tradeoff (ApproBiVT). When evaluating with advanced ASR models, our recipe provides 2.5%-3.7% and 3.1%-4.6% CER reduction on the AISHELL-1 and AISHELL-2, respectively.
Exploiting Neighborhood Structural Features for Change Detection
Feb 10, 2023In this letter, a novel method for change detection is proposed using neighborhood structure correlation. Because structure features are insensitive to the intensity differences between bi-temporal images, we perform the correlation analysis on structure features rather than intensity information. First, we extract the structure feature maps by using multi-orientated gradient information. Then, the structure feature maps are used to obtain the Neighborhood Structural Correlation Image (NSCI), which can represent the context structure information. In addition, we introduce a measure named matching error which can be used to improve neighborhood information. Subsequently, a change detection model based on the random forest is constructed. The NSCI feature and matching error are used as the model inputs for training and prediction. Finally, the decision tree voting is used to produce the change detection result. To evaluate the performance of the proposed method, it was compared with three state-of-the-art change detection methods. The experimental results on two datasets demonstrated the effectiveness and robustness of the proposed method.
Linked Dynamic Graph CNN: Learning on Point Cloud via Linking Hierarchical Features
Apr 22, 2019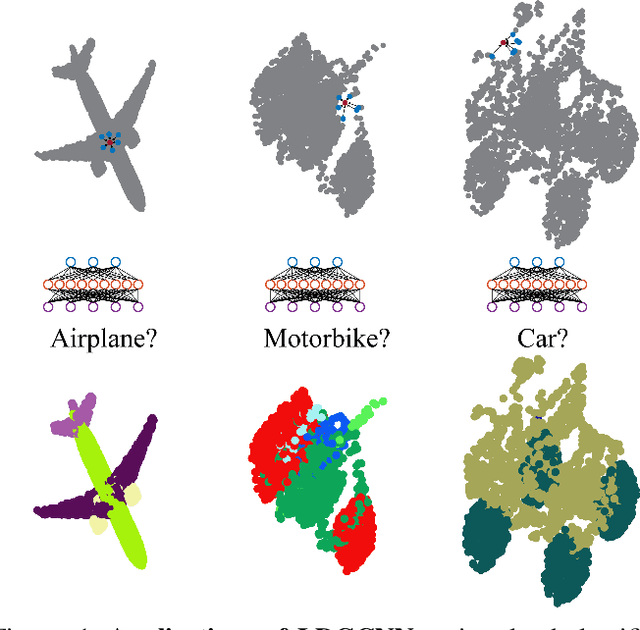


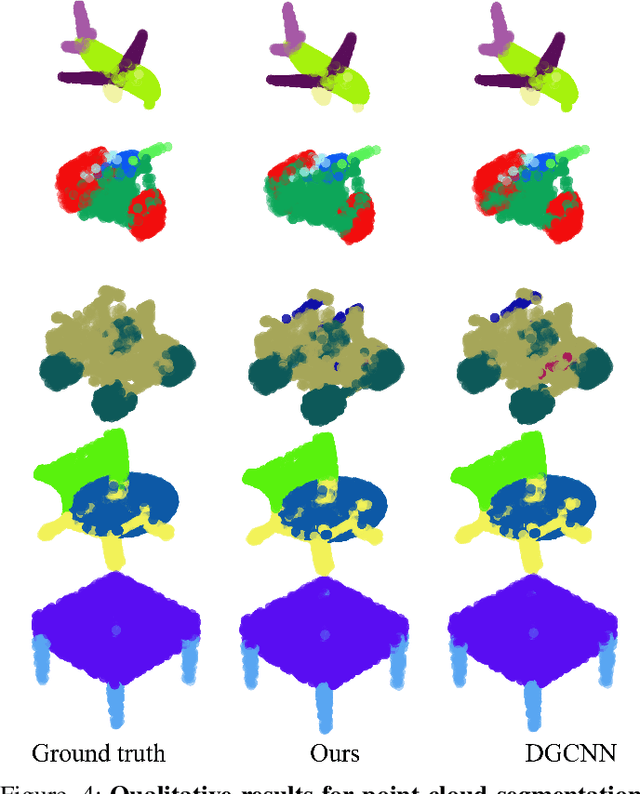
Learning on point cloud is eagerly in demand because the point cloud is a common type of geometric data and can aid robots to understand environments robustly. However, the point cloud is sparse, unstructured, and unordered, which cannot be recognized accurately by a traditional convolutional neural network (CNN) nor a recurrent neural network (RNN). Fortunately, a graph convolutional neural network (Graph CNN) can process sparse and unordered data. Hence, we propose a linked dynamic graph CNN (LDGCNN) to classify and segment point cloud directly in this paper. We remove the transformation network, link hierarchical features from dynamic graphs, freeze feature extractor, and retrain the classifier to increase the performance of LDGCNN. We explain our network using theoretical analysis and visualization. Through experiments, we show that the proposed LDGCNN achieves state-of-art performance on two standard datasets: ModelNet40 and ShapeNet.