 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinked Dynamic Graph CNN: Learning on Point Cloud via Linking Hierarchical Features
Paper and Code
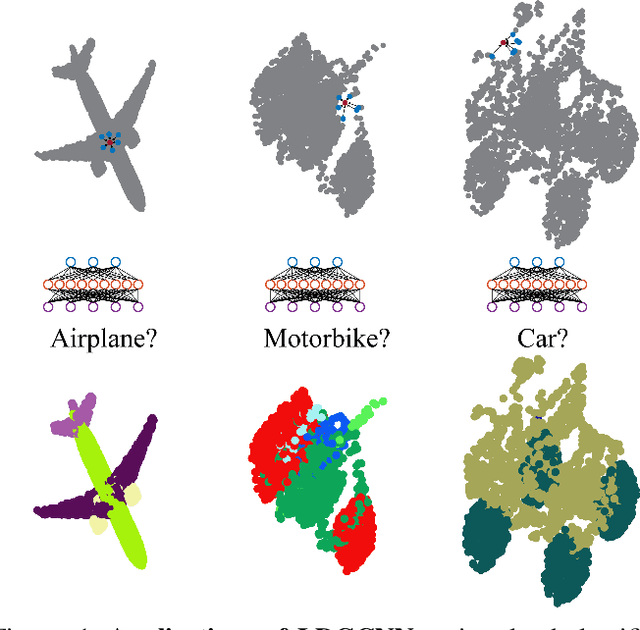


Learning on point cloud is eagerly in demand because the point cloud is a common type of geometric data and can aid robots to understand environments robustly. However, the point cloud is sparse, unstructured, and unordered, which cannot be recognized accurately by a traditional convolutional neural network (CNN) nor a recurrent neural network (RNN). Fortunately, a graph convolutional neural network (Graph CNN) can process sparse and unordered data. Hence, we propose a linked dynamic graph CNN (LDGCNN) to classify and segment point cloud directly in this paper. We remove the transformation network, link hierarchical features from dynamic graphs, freeze feature extractor, and retrain the classifier to increase the performance of LDGCNN. We explain our network using theoretical analysis and visualization. Through experiments, we show that the proposed LDGCNN achieves state-of-art performance on two standard datasets: ModelNet40 and ShapeNet.