 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHilti-Oxford Dataset: A Millimetre-Accurate Benchmark for Simultaneous Localization and Mapping
Aug 21, 2022
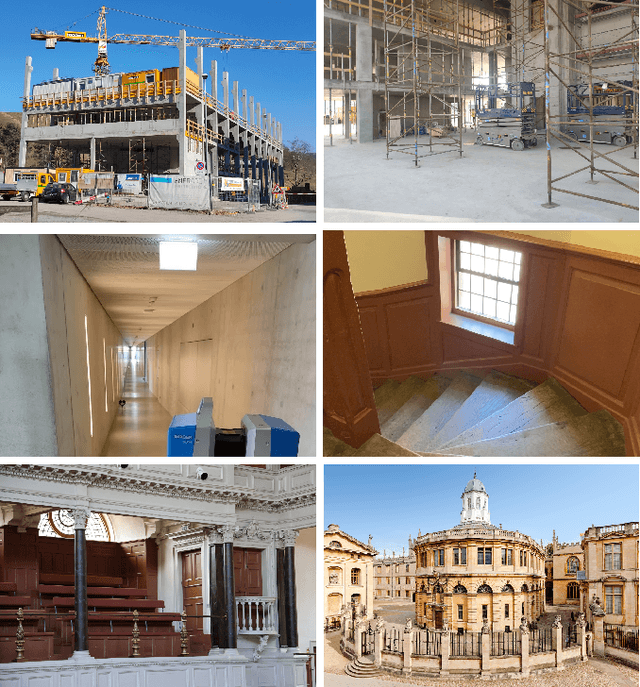
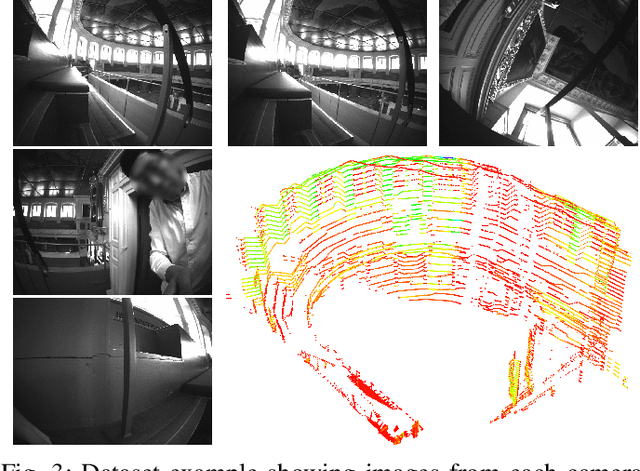

Simultaneous Localization and Mapping (SLAM) is being deployed in real-world applications, however many state-of-the-art solutions still struggle in many common scenarios. A key necessity in progressing SLAM research is the availability of high-quality datasets and fair and transparent benchmarking. To this end, we have created the Hilti-Oxford Dataset, to push state-of-the-art SLAM systems to their limits. The dataset has a variety of challenges ranging from sparse and regular construction sites to a 17th century neoclassical building with fine details and curved surfaces. To encourage multi-modal SLAM approaches, we designed a data collection platform featuring a lidar, five cameras, and an IMU (Inertial Measurement Unit). With the goal of benchmarking SLAM algorithms for tasks where accuracy and robustness are paramount, we implemented a novel ground truth collection method that enables our dataset to accurately measure SLAM pose errors with millimeter accuracy. To further ensure accuracy, the extrinsics of our platform were verified with a micrometer-accurate scanner, and temporal calibration was managed online using hardware time synchronization. The multi-modality and diversity of our dataset attracted a large field of academic and industrial researchers to enter the second edition of the Hilti SLAM challenge, which concluded in June 2022. The results of the challenge show that while the top three teams could achieve accuracy of 2cm or better for some sequences, the performance dropped off in more difficult sequences.
The Hilti SLAM Challenge Dataset
Sep 23, 2021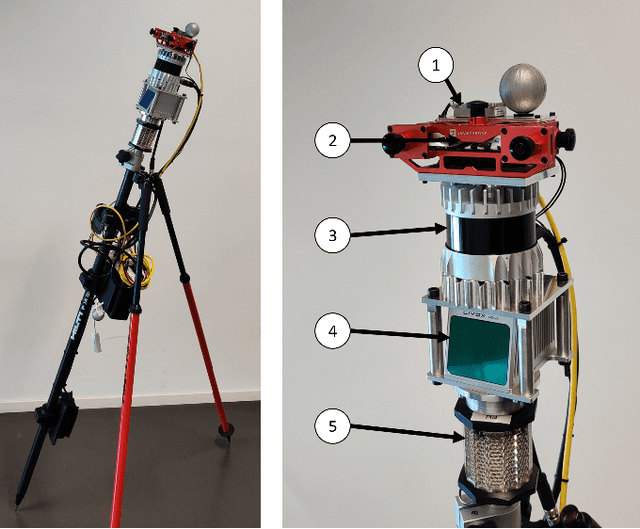
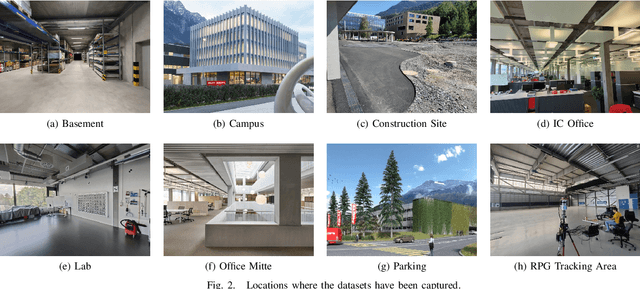

Accurate and robust pose estimation is a fundamental capability for autonomous systems to navigate, map and perform tasks. Particularly, construction environments pose challenging problem to Simultaneous Localization and Mapping (SLAM) algorithms due to sparsity, varying illumination conditions, and dynamic objects. Current academic research in SLAM is focused on developing more accurate and robust algorithms for example by fusing different sensor modalities. To help this research, we propose a new dataset, the Hilti SLAM Challenge Dataset. The sensor platform used to collect this dataset contains a number of visual, lidar and inertial sensors which have all been rigorously calibrated. All data is temporally aligned to support precise multi-sensor fusion. Each dataset includes accurate ground truth to allow direct testing of SLAM results. Raw data as well as intrinsic and extrinsic sensor calibration data from twelve datasets in various environments is provided. Each environment represents common scenarios found in building construction sites in various stages of completion.