 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Hilti SLAM Challenge Dataset
Paper and Code
Sep 23, 2021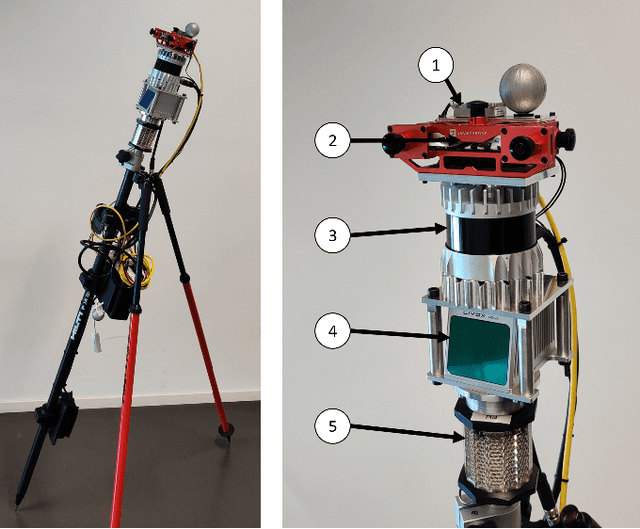
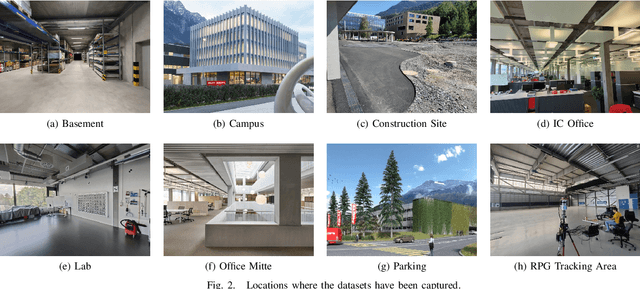

Accurate and robust pose estimation is a fundamental capability for autonomous systems to navigate, map and perform tasks. Particularly, construction environments pose challenging problem to Simultaneous Localization and Mapping (SLAM) algorithms due to sparsity, varying illumination conditions, and dynamic objects. Current academic research in SLAM is focused on developing more accurate and robust algorithms for example by fusing different sensor modalities. To help this research, we propose a new dataset, the Hilti SLAM Challenge Dataset. The sensor platform used to collect this dataset contains a number of visual, lidar and inertial sensors which have all been rigorously calibrated. All data is temporally aligned to support precise multi-sensor fusion. Each dataset includes accurate ground truth to allow direct testing of SLAM results. Raw data as well as intrinsic and extrinsic sensor calibration data from twelve datasets in various environments is provided. Each environment represents common scenarios found in building construction sites in various stages of completion.