 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalyzing Closed-loop Training Techniques for Realistic Traffic Agent Models in Autonomous Highway Driving Simulations
Oct 21, 2024Simulation plays a crucial role in the rapid development and safe deployment of autonomous vehicles. Realistic traffic agent models are indispensable for bridging the gap between simulation and the real world. Many existing approaches for imitating human behavior are based on learning from demonstration. However, these approaches are often constrained by focusing on individual training strategies. Therefore, to foster a broader understanding of realistic traffic agent modeling, in this paper, we provide an extensive comparative analysis of different training principles, with a focus on closed-loop methods for highway driving simulation. We experimentally compare (i) open-loop vs. closed-loop multi-agent training, (ii) adversarial vs. deterministic supervised training, (iii) the impact of reinforcement losses, and (iv) the impact of training alongside log-replayed agents to identify suitable training techniques for realistic agent modeling. Furthermore, we identify promising combinations of different closed-loop training methods.
INTERACTION Dataset: An INTERnational, Adversarial and Cooperative moTION Dataset in Interactive Driving Scenarios with Semantic Maps
Sep 30, 2019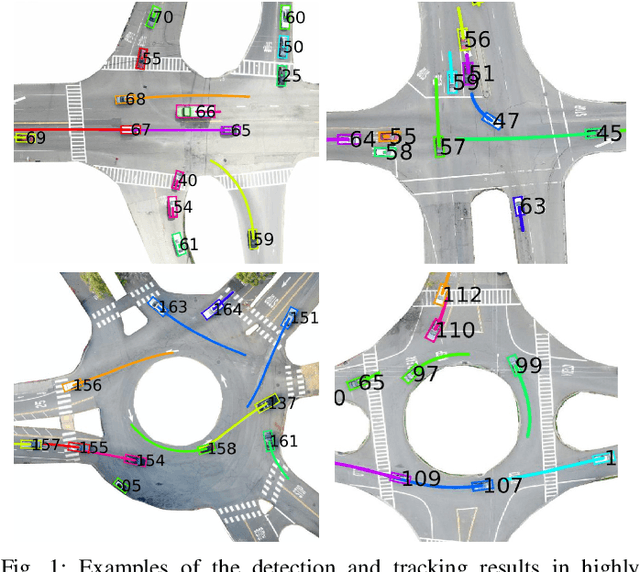
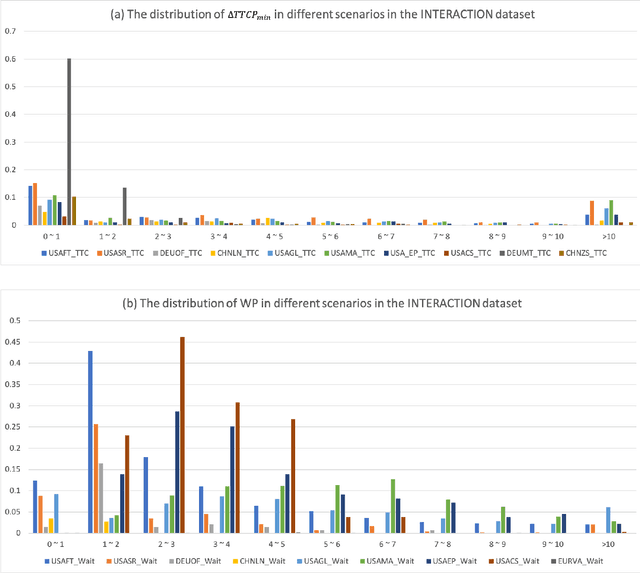
Behavior-related research areas such as motion prediction/planning, representation/imitation learning, behavior modeling/generation, and algorithm testing, require support from high-quality motion datasets containing interactive driving scenarios with different driving cultures. In this paper, we present an INTERnational, Adversarial and Cooperative moTION dataset (INTERACTION dataset) in interactive driving scenarios with semantic maps. Five features of the dataset are highlighted. 1) The interactive driving scenarios are diverse, including urban/highway/ramp merging and lane changes, roundabouts with yield/stop signs, signalized intersections, intersections with one/two/all-way stops, etc. 2) Motion data from different countries and different continents are collected so that driving preferences and styles in different cultures are naturally included. 3) The driving behavior is highly interactive and complex with adversarial and cooperative motions of various traffic participants. Highly complex behavior such as negotiations, aggressive/irrational decisions and traffic rule violations are densely contained in the dataset, while regular behavior can also be found from cautious car-following, stop, left/right/U-turn to rational lane-change and cycling and pedestrian crossing, etc. 4) The levels of criticality span wide, from regular safe operations to dangerous, near-collision maneuvers. Real collision, although relatively slight, is also included. 5) Maps with complete semantic information are provided with physical layers, reference lines, lanelet connections and traffic rules. The data is recorded from drones and traffic cameras. Statistics of the dataset in terms of number of entities and interaction density are also provided, along with some utilization examples in a variety of behavior-related research areas. The dataset can be downloaded via https://interaction-dataset.com.
Generating Comfortable, Safe and Comprehensible Trajectories for Automated Vehicles in Mixed Traffic
May 14, 2018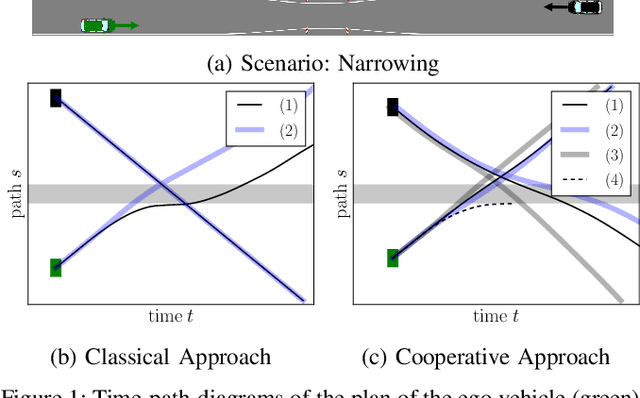
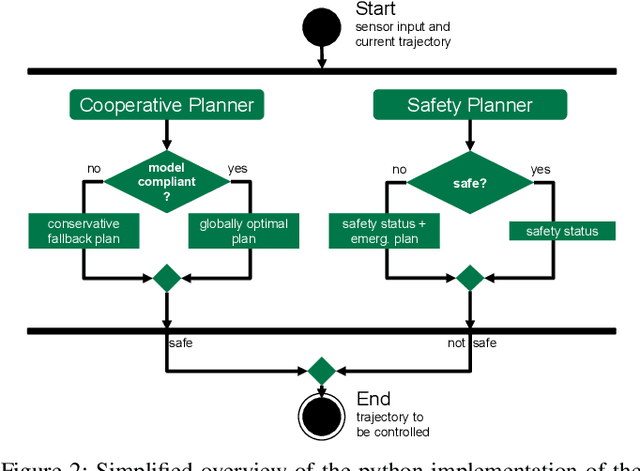

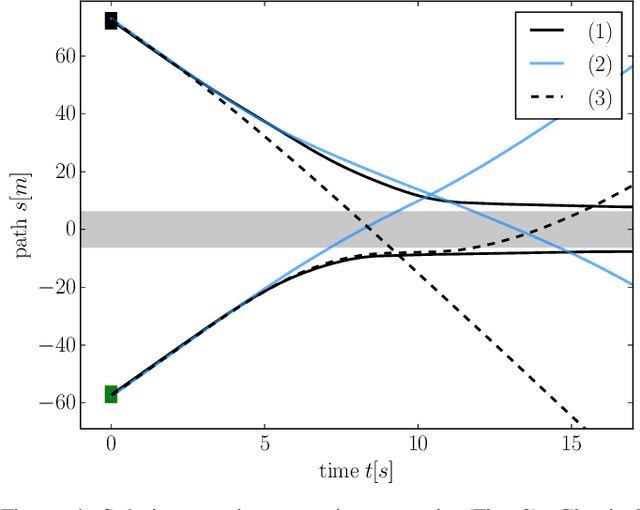
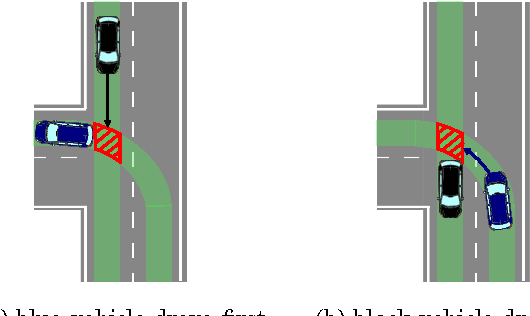
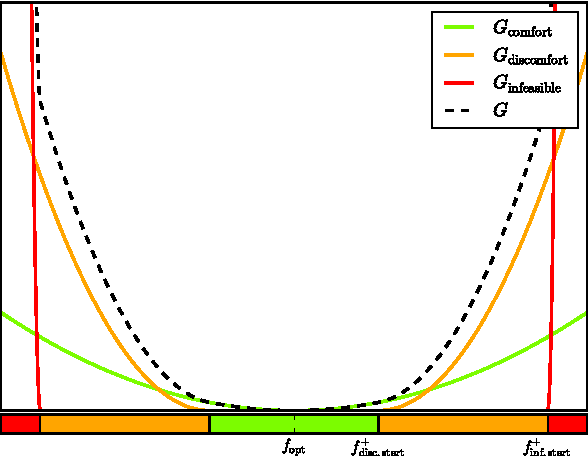
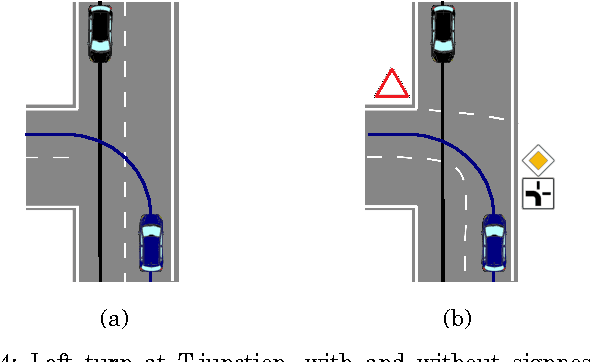
While motion planning approaches for automated driving often focus on safety and mathematical optimality with respect to technical parameters, they barely consider convenience, perceived safety for the passenger and comprehensibility for other traffic participants. For automated driving in mixed traffic, however, this is key to reach public acceptance. In this paper, we revise the problem statement of motion planning in mixed traffic: Instead of largely simplifying the motion planning problem to a convex optimization problem, we keep a more complex probabilistic multi agent model and strive for a near optimal solution. We assume cooperation of other traffic participants, yet being aware of violations of this assumption. This approach yields solutions that are provably safe in all situations, and convenient and comprehensible in situations that are also unambiguous for humans. Thus, it outperforms existing approaches in mixed traffic scenarios, as we show in our simulation environment.
Cooperative Motion Planning for Non-Holonomic Agents with Value Iteration Networks
Sep 15, 2017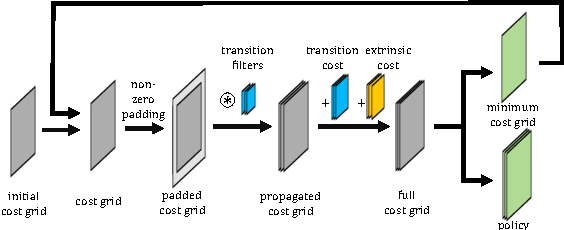
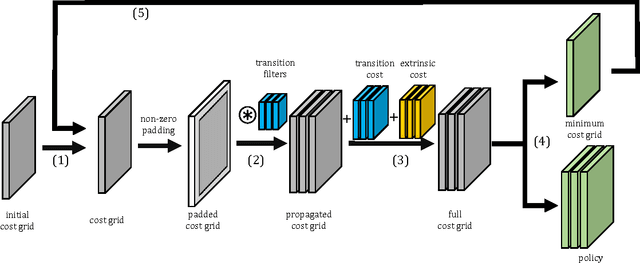
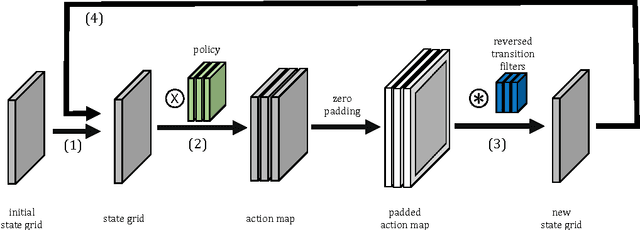
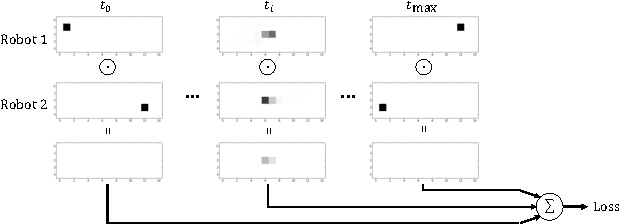
Cooperative motion planning is still a challenging task for robots. Recently, Value Iteration Networks (VINs) were proposed to model motion planning tasks as Neural Networks. In this work, we extend VINs to solve cooperative planning tasks under non-holonomic constraints. For this, we interconnect multiple VINs to pay respect to each other's outputs. Policies for cooperation are generated via iterative gradient descend. Validation in simulation shows that the resulting networks can resolve non-holonomic motion planning problems that require cooperation.
Towards Cooperative Motion Planning for Automated Vehicles in Mixed Traffic
Aug 23, 2017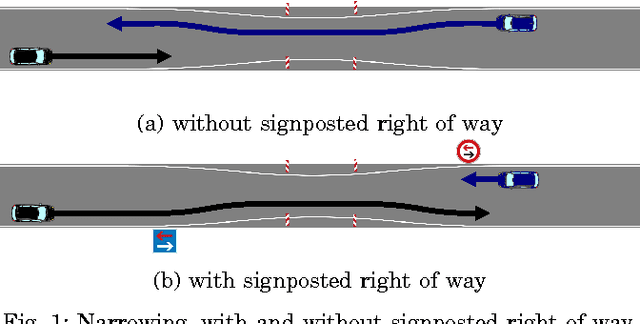
While motion planning techniques for automated vehicles in a reactive and anticipatory manner are already widely presented, approaches to cooperative motion planning are still remaining. In this paper, we present an approach to enhance common motion planning algorithms, that allows for cooperation with human-driven vehicles. Unlike previous approaches, we integrate the prediction of other traffic participants into the motion planning, such that the influence of the ego vehicle's behavior on the other traffic participants can be taken into account. For this purpose, a new cost functional is presented, containing the cost for all relevant traffic participants in the scene. Finally, we propose a path-velocity-decomposing sampling-based implementation of our approach for selected scenarios, which is evaluated in a simulation.