 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalyzing Closed-loop Training Techniques for Realistic Traffic Agent Models in Autonomous Highway Driving Simulations
Oct 21, 2024Simulation plays a crucial role in the rapid development and safe deployment of autonomous vehicles. Realistic traffic agent models are indispensable for bridging the gap between simulation and the real world. Many existing approaches for imitating human behavior are based on learning from demonstration. However, these approaches are often constrained by focusing on individual training strategies. Therefore, to foster a broader understanding of realistic traffic agent modeling, in this paper, we provide an extensive comparative analysis of different training principles, with a focus on closed-loop methods for highway driving simulation. We experimentally compare (i) open-loop vs. closed-loop multi-agent training, (ii) adversarial vs. deterministic supervised training, (iii) the impact of reinforcement losses, and (iv) the impact of training alongside log-replayed agents to identify suitable training techniques for realistic agent modeling. Furthermore, we identify promising combinations of different closed-loop training methods.
Goal-Driven Autonomous Mapping Through Deep Reinforcement Learning and Planning-Based Navigation
Mar 12, 2021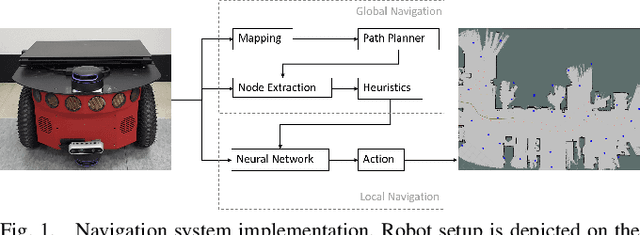
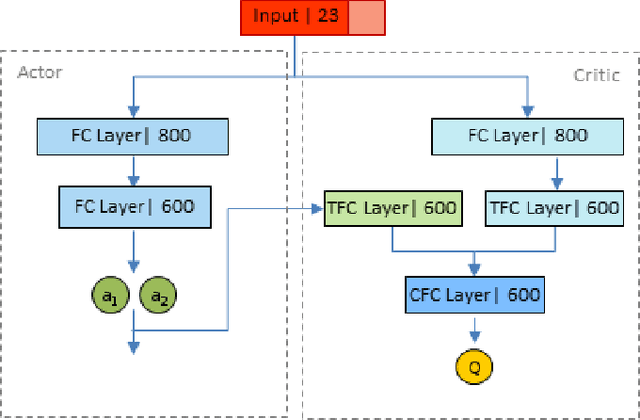
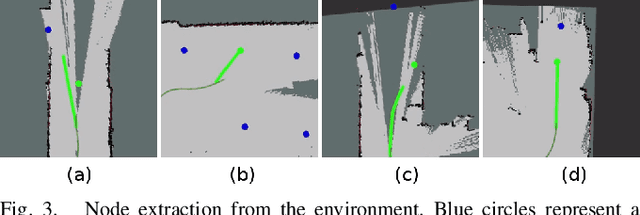
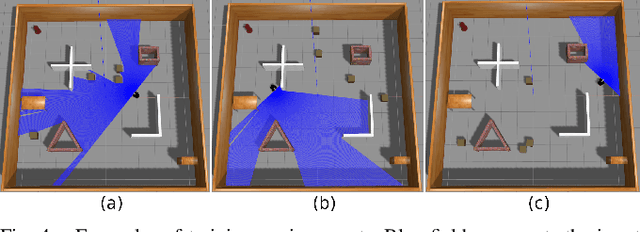
In this paper, we present a goal-driven autonomous mapping and exploration system that combines reactive and planned robot navigation. First, a navigation policy is learned through a deep reinforcement learning (DRL) framework in a simulated environment. This policy guides an autonomous agent towards a goal while avoiding obstacles. We develop a navigation system where this learned policy is integrated into a motion planning stack as the local navigation layer to move the robot towards the intermediate goals. A global path planner is used to mitigate the local optimum problem and guide the robot towards the global goal. Possible intermediate goal locations are extracted from the environment and used as local goals according to the navigation system heuristics. The fully autonomous navigation is performed without any prior knowledge while mapping is performed as the robot moves through the environment. Experiments show the capability of the system navigating in previously unknown surroundings and arriving at the designated goal.