 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgeimitation: Clean Imitation Learning Implementations
Nov 22, 2022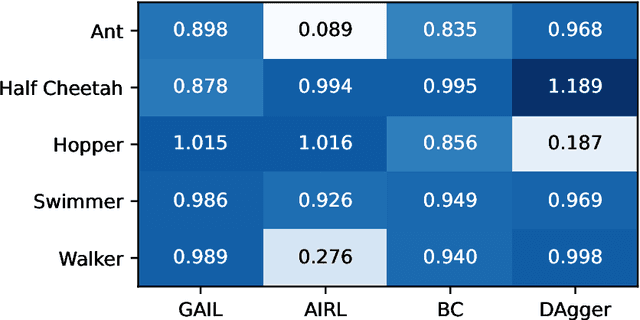
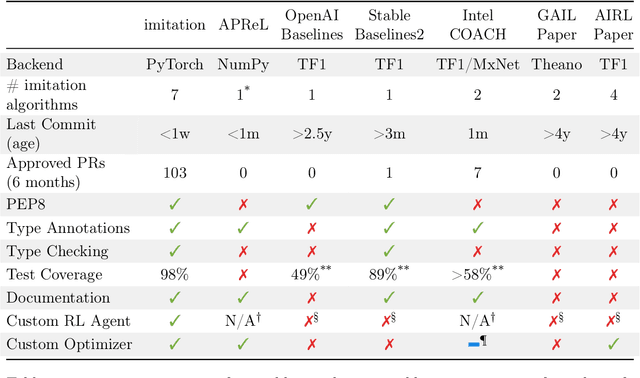
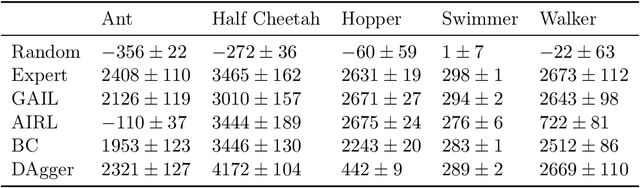
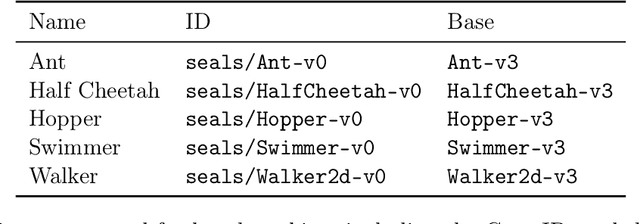
imitation provides open-source implementations of imitation and reward learning algorithms in PyTorch. We include three inverse reinforcement learning (IRL) algorithms, three imitation learning algorithms and a preference comparison algorithm. The implementations have been benchmarked against previous results, and automated tests cover 98% of the code. Moreover, the algorithms are implemented in a modular fashion, making it simple to develop novel algorithms in the framework. Our source code, including documentation and examples, is available at https://github.com/HumanCompatibleAI/imitation
Distributed Cohesive Control for Robot Swarms: Maintaining Good Connectivity in the Presence of Exterior Forces
May 12, 2015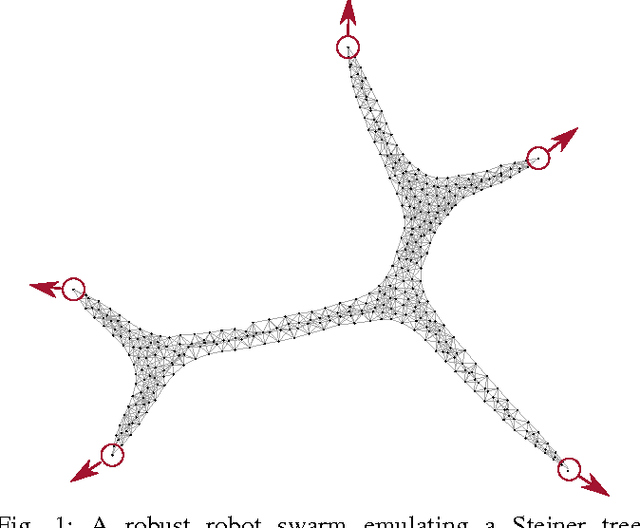
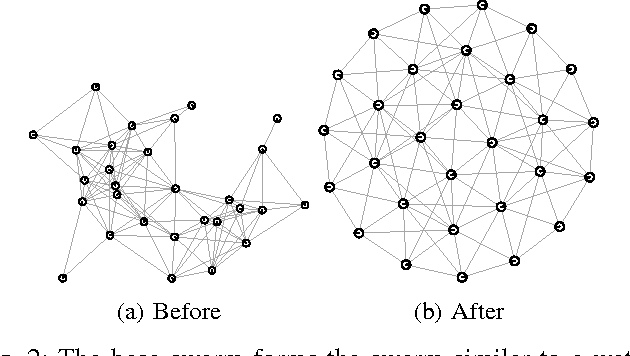
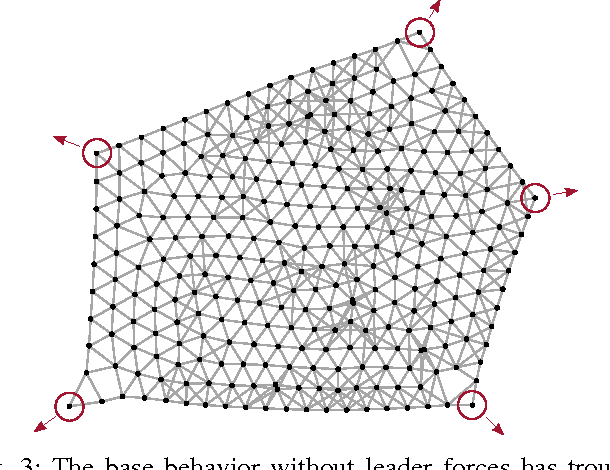
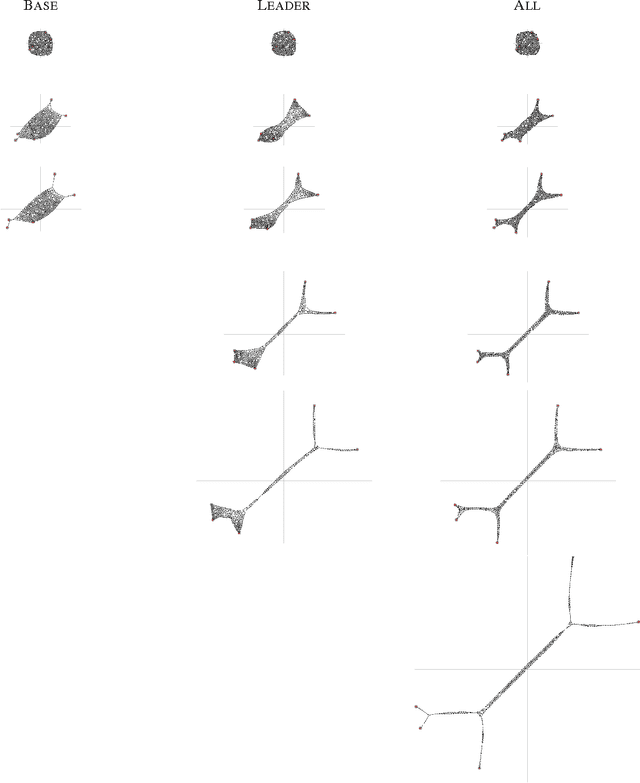
We present a number of powerful local mechanisms for maintaining a dynamic swarm of robots with limited capabilities and information, in the presence of external forces and permanent node failures. We propose a set of local continuous algorithms that together produce a generalization of a Euclidean Steiner tree. At any stage, the resulting overall shape achieves a good compromise between local thickness, global connectivity, and flexibility to further continuous motion of the terminals. The resulting swarm behavior scales well, is robust against node failures, and performs close to the best known approximation bound for a corresponding centralized static optimization problem.