 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAre Hyperbolic Representations in Graphs Created Equal?
Jul 15, 2020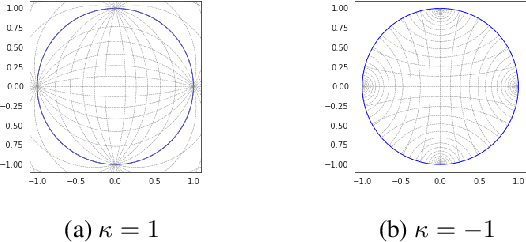

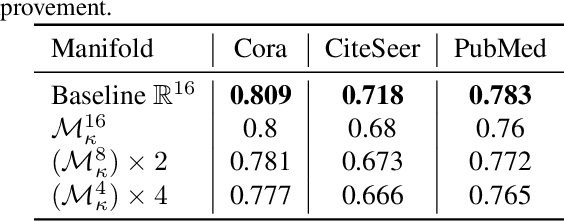
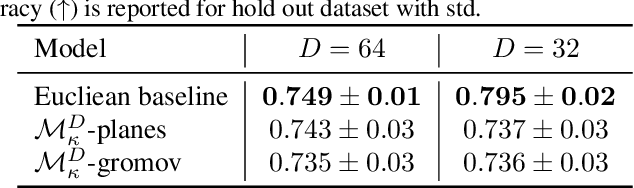
Recently there was an increasing interest in applications of graph neural networks in non-Euclidean geometry; however, are non-Euclidean representations always useful for graph learning tasks? For different problems such as node classification and link prediction we compute hyperbolic embeddings and conclude that for tasks that require global prediction consistency it might be useful to use non-Euclidean embeddings, while for other tasks Euclidean models are superior. To do so we first fix an issue of the existing models associated with the optimization process at zero curvature. Current hyperbolic models deal with gradients at the origin in ad-hoc manner, which is inefficient and can lead to numerical instabilities. We solve the instabilities of kappa-Stereographic model at zero curvature cases and evaluate the approach of embedding graphs into the manifold in several graph representation learning tasks.
Geoopt: Riemannian Optimization in PyTorch
May 12, 2020Geoopt is a research-oriented modular open-source package for Riemannian Optimization in PyTorch. The core of Geoopt is a standard Manifold interface which allows for the generic implementation of optimization algorithms. Geoopt supports basic Riemannian SGD as well as adaptive optimization algorithms. Geoopt also provides several algorithms and arithmetic methods for supported manifolds, which allow composing geometry-aware neural network layers that can be integrated with existing models.
User-Controllable Multi-Texture Synthesis with Generative Adversarial Networks
Apr 24, 2019We propose a novel multi-texture synthesis model based on generative adversarial networks (GANs) with a user-controllable mechanism. The user control ability allows to explicitly specify the texture which should be generated by the model. This property follows from using an encoder part which learns a latent representation for each texture from the dataset. To ensure a dataset coverage, we use an adversarial loss function that penalizes for incorrect reproductions of a given texture. In experiments, we show that our model can learn descriptive texture manifolds for large datasets and from raw data such as a collection of high-resolution photos. Moreover, we apply our method to produce 3D textures and show that it outperforms existing baselines.
Pairwise Augmented GANs with Adversarial Reconstruction Loss
Oct 11, 2018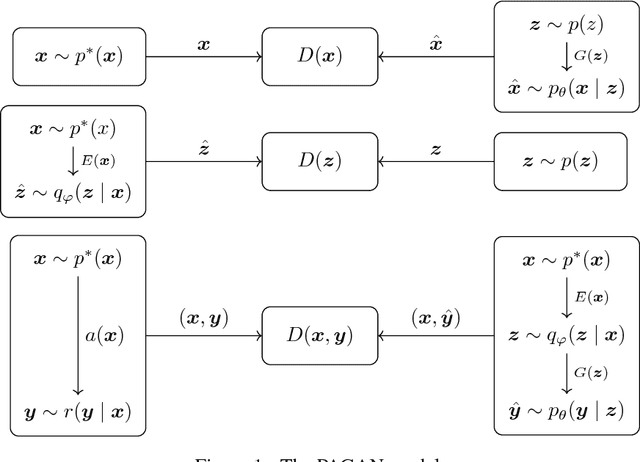
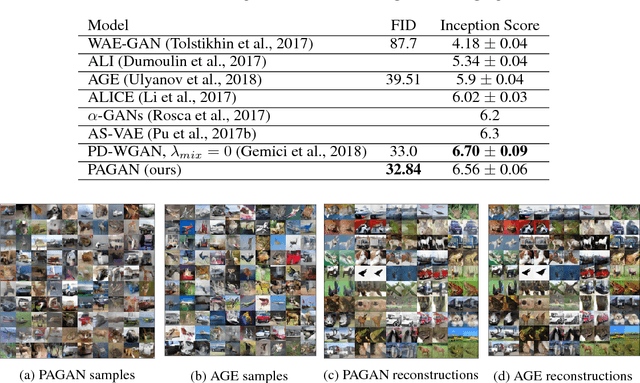

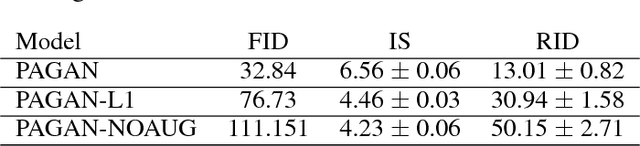
We propose a novel autoencoding model called Pairwise Augmented GANs. We train a generator and an encoder jointly and in an adversarial manner. The generator network learns to sample realistic objects. In turn, the encoder network at the same time is trained to map the true data distribution to the prior in latent space. To ensure good reconstructions, we introduce an augmented adversarial reconstruction loss. Here we train a discriminator to distinguish two types of pairs: an object with its augmentation and the one with its reconstruction. We show that such adversarial loss compares objects based on the content rather than on the exact match. We experimentally demonstrate that our model generates samples and reconstructions of quality competitive with state-of-the-art on datasets MNIST, CIFAR10, CelebA and achieves good quantitative results on CIFAR10.
Bayesian Incremental Learning for Deep Neural Networks
Mar 27, 2018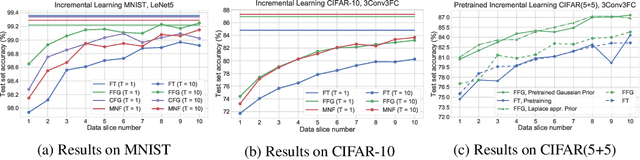
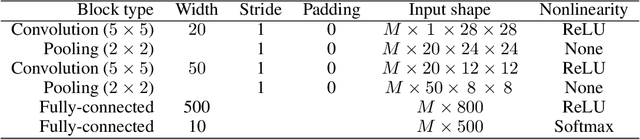
In industrial machine learning pipelines, data often arrive in parts. Particularly in the case of deep neural networks, it may be too expensive to train the model from scratch each time, so one would rather use a previously learned model and the new data to improve performance. However, deep neural networks are prone to getting stuck in a suboptimal solution when trained on only new data as compared to the full dataset. Our work focuses on a continuous learning setup where the task is always the same and new parts of data arrive sequentially. We apply a Bayesian approach to update the posterior approximation with each new piece of data and find this method to outperform the traditional approach in our experiments.