 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating OCR Performance for Assistive Technology: Effects of Walking Speed, Camera Placement, and Camera Type
Feb 02, 2026Optical character recognition (OCR), which converts printed or handwritten text into machine-readable form, is widely used in assistive technology for people with blindness and low vision. Yet, most evaluations rely on static datasets that do not reflect the challenges of mobile use. In this study, we systematically evaluated OCR performance under both static and dynamic conditions. Static tests measured detection range across distances of 1-7 meters and viewing angles of 0-75 degrees horizontally. Dynamic tests examined the impact of motion by varying walking speed from slow (0.8 m/s) to very fast (1.8 m/s) and comparing three camera mounting positions: head-mounted, shoulder-mounted, and hand-held. We evaluated both a smartphone and smart glasses, using the phone's main and ultra-wide cameras. Four OCR engines were benchmarked to assess accuracy at different distances and viewing angles: Google Vision, PaddleOCR 3.0, EasyOCR, and Tesseract. PaddleOCR 3.0 was then used to evaluate accuracy at different walking speeds. Accuracy was computed at the character level using the Levenshtein ratio against manually defined ground truth. Results showed that recognition accuracy declined with increased walking speed and wider viewing angles. Google Vision achieved the highest overall accuracy, with PaddleOCR close behind as the strongest open-source alternative. Across devices, the phone's main camera achieved the highest accuracy, and a shoulder-mounted placement yielded the highest average among body positions; however, differences among shoulder, head, and hand were not statistically significant.
Robust Computer-Vision based Construction Site Detection for Assistive-Technology Applications
Mar 06, 2025Navigating urban environments poses significant challenges for people with disabilities, particularly those with blindness and low vision. Environments with dynamic and unpredictable elements like construction sites are especially challenging. Construction sites introduce hazards like uneven surfaces, obstructive barriers, hazardous materials, and excessive noise, and they can alter routing, complicating safe mobility. Existing assistive technologies are limited, as navigation apps do not account for construction sites during trip planning, and detection tools that attempt hazard recognition struggle to address the extreme variability of construction paraphernalia. This study introduces a novel computer vision-based system that integrates open-vocabulary object detection, a YOLO-based scaffolding-pole detection model, and an optical character recognition (OCR) module to comprehensively identify and interpret construction site elements for assistive navigation. In static testing across seven construction sites, the system achieved an overall accuracy of 88.56\%, reliably detecting objects from 2m to 10m within a 0$^\circ$ -- 75$^\circ$ angular offset. At closer distances (2--4m), the detection rate was 100\% at all tested angles. At
Hybrid Platform for Swarm Robotics: Experiments and High-Dimensional Continuification Control
Oct 02, 2023



A significant challenge in control theory and technology is to devise agile and less resource-intensive experiments for evaluating the performance and feasibility of control algorithms for the collective coordination of large-scale complex systems. Many new methodologies are based on macroscopic representations of the emerging system behavior, and can be easily validated only through numerical simulations, because of the inherent hurdle of developing full scale experimental platforms. In this paper, we introduce a novel hybrid set-up for testing swarm robotics techniques, focusing on the collective motion of robotic swarms. This hybrid apparatus combines both real differential drive robots and virtual agents to create a heterogeneous swarm of tunable size. We validate the methodology by extending to higher dimensions, and investigating experimentally, continuification-based control methods for swarms. Our study demonstrates the versatility and effectiveness of the platform for conducting large-scale swarm robotics experiments. Also, it contributes new theoretical insights into control algorithms exploiting continuification approaches.
Network-Aware 5G Edge Computing for Object Detection: Augmenting Wearables to "See'' More, Farther and Faster
Dec 25, 2021


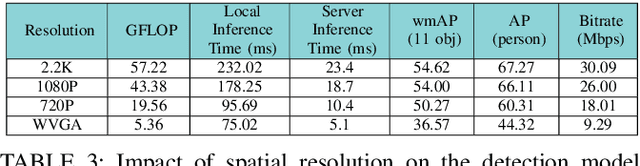
Advanced wearable devices are increasingly incorporating high-resolution multi-camera systems. As state-of-the-art neural networks for processing the resulting image data are computationally demanding, there has been growing interest in leveraging fifth generation (5G) wireless connectivity and mobile edge computing for offloading this processing to the cloud. To assess this possibility, this paper presents a detailed simulation and evaluation of 5G wireless offloading for object detection within a powerful, new smart wearable called VIS4ION, for the Blind-and-Visually Impaired (BVI). The current VIS4ION system is an instrumented book-bag with high-resolution cameras, vision processing and haptic and audio feedback. The paper considers uploading the camera data to a mobile edge cloud to perform real-time object detection and transmitting the detection results back to the wearable. To determine the video requirements, the paper evaluates the impact of video bit rate and resolution on object detection accuracy and range. A new street scene dataset with labeled objects relevant to BVI navigation is leveraged for analysis. The vision evaluation is combined with a detailed full-stack wireless network simulation to determine the distribution of throughputs and delays with real navigation paths and ray-tracing from new high-resolution 3D models in an urban environment. For comparison, the wireless simulation considers both a standard 4G-Long Term Evolution (LTE) carrier and high-rate 5G millimeter-wave (mmWave) carrier. The work thus provides a thorough and realistic assessment of edge computing with mmWave connectivity in an application with both high bandwidth and low latency requirements.
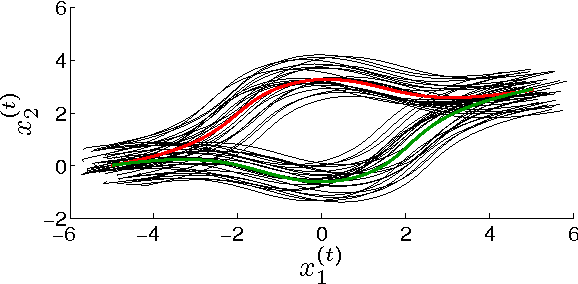
Dimensionality Reduction of Collective Motion by Principal Manifolds
Aug 13, 2015
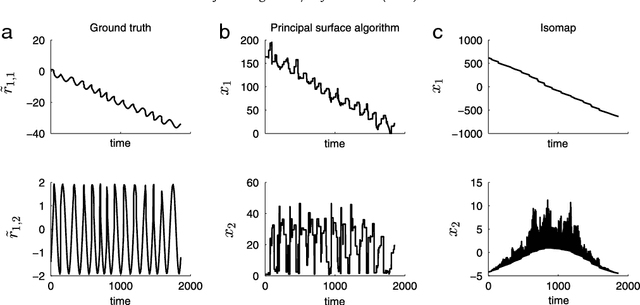
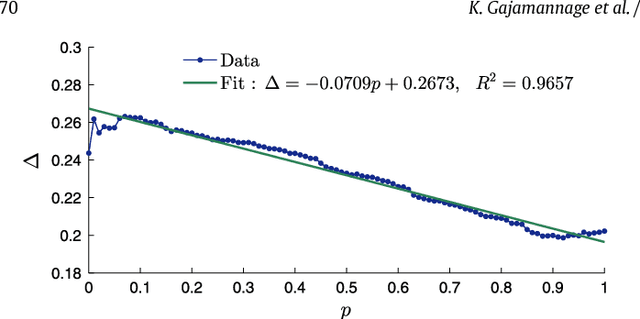
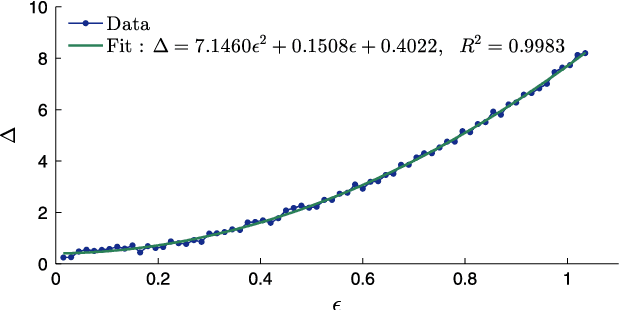
While the existence of low-dimensional embedding manifolds has been shown in patterns of collective motion, the current battery of nonlinear dimensionality reduction methods are not amenable to the analysis of such manifolds. This is mainly due to the necessary spectral decomposition step, which limits control over the mapping from the original high-dimensional space to the embedding space. Here, we propose an alternative approach that demands a two-dimensional embedding which topologically summarizes the high-dimensional data. In this sense, our approach is closely related to the construction of one-dimensional principal curves that minimize orthogonal error to data points subject to smoothness constraints. Specifically, we construct a two-dimensional principal manifold directly in the high-dimensional space using cubic smoothing splines, and define the embedding coordinates in terms of geodesic distances. Thus, the mapping from the high-dimensional data to the manifold is defined in terms of local coordinates. Through representative examples, we show that compared to existing nonlinear dimensionality reduction methods, the principal manifold retains the original structure even in noisy and sparse datasets. The principal manifold finding algorithm is applied to configurations obtained from a dynamical system of multiple agents simulating a complex maneuver called predator mobbing, and the resulting two-dimensional embedding is compared with that of a well-established nonlinear dimensionality reduction method.
* 19 pages, 13 figures, journal article
Identifying manifolds underlying group motion in Vicsek agents
Aug 12, 2015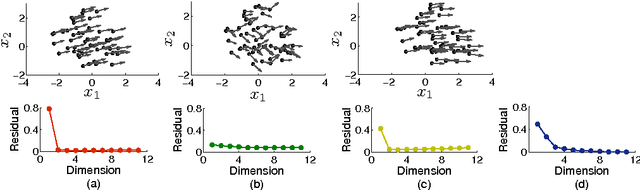
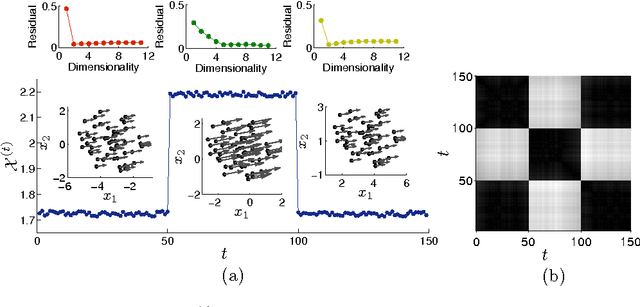
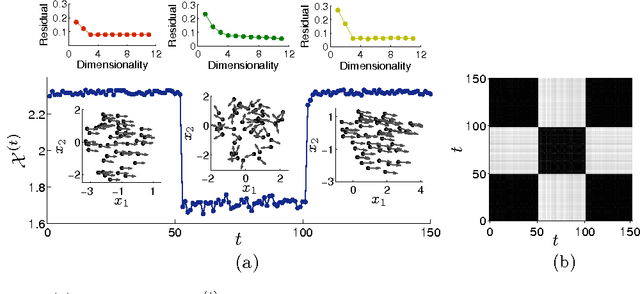
Collective motion of animal groups often undergoes changes due to perturbations. In a topological sense, we describe these changes as switching between low-dimensional embedding manifolds underlying a group of evolving agents. To characterize such manifolds, first we introduce a simple mapping of agents between time-steps. Then, we construct a novel metric which is susceptible to variations in the collective motion, thus revealing distinct underlying manifolds. The method is validated through three sample scenarios simulated using a Vicsek model, namely switching of speed, coordination, and structure of a group. Combined with a dimensionality reduction technique that is used to infer the dimensionality of the embedding manifold, this approach provides an effective model-free framework for the analysis of collective behavior across animal species.