 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVET: Visual Error Tomography for Point Cloud Completion and High-Quality Neural Rendering
Nov 08, 2023
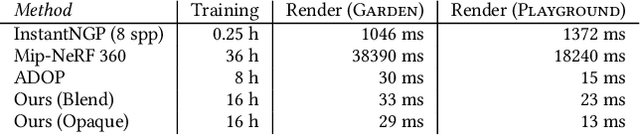
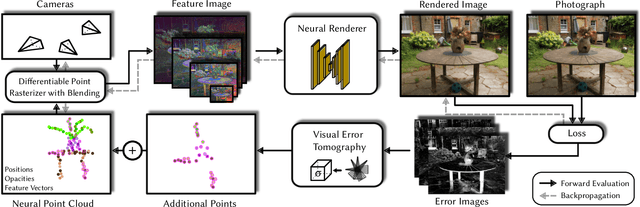
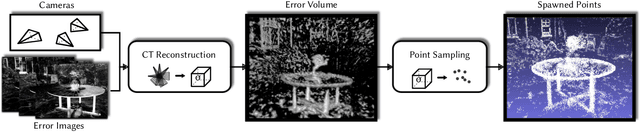
In the last few years, deep neural networks opened the doors for big advances in novel view synthesis. Many of these approaches are based on a (coarse) proxy geometry obtained by structure from motion algorithms. Small deficiencies in this proxy can be fixed by neural rendering, but larger holes or missing parts, as they commonly appear for thin structures or for glossy regions, still lead to distracting artifacts and temporal instability. In this paper, we present a novel neural-rendering-based approach to detect and fix such deficiencies. As a proxy, we use a point cloud, which allows us to easily remove outlier geometry and to fill in missing geometry without complicated topological operations. Keys to our approach are (i) a differentiable, blending point-based renderer that can blend out redundant points, as well as (ii) the concept of Visual Error Tomography (VET), which allows us to lift 2D error maps to identify 3D-regions lacking geometry and to spawn novel points accordingly. Furthermore, (iii) by adding points as nested environment maps, our approach allows us to generate high-quality renderings of the surroundings in the same pipeline. In our results, we show that our approach can improve the quality of a point cloud obtained by structure from motion and thus increase novel view synthesis quality significantly. In contrast to point growing techniques, the approach can also fix large-scale holes and missing thin structures effectively. Rendering quality outperforms state-of-the-art methods and temporal stability is significantly improved, while rendering is possible at real-time frame rates.
NRMVS: Non-Rigid Multi-View Stereo
Jan 12, 2019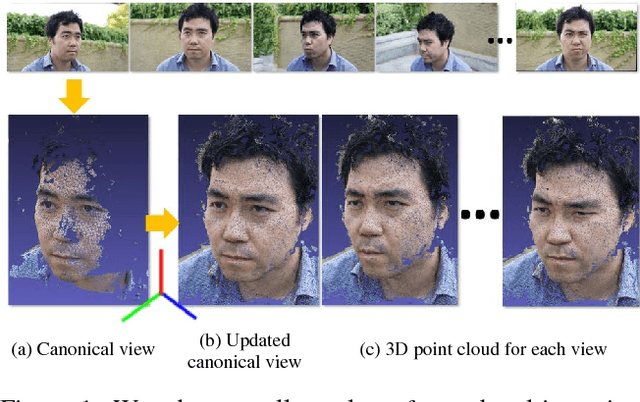

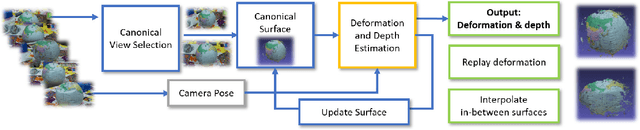

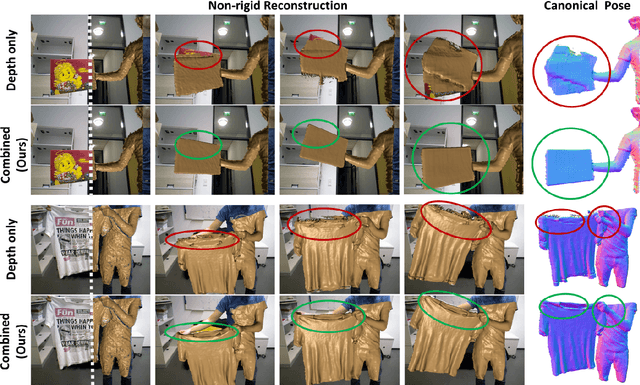
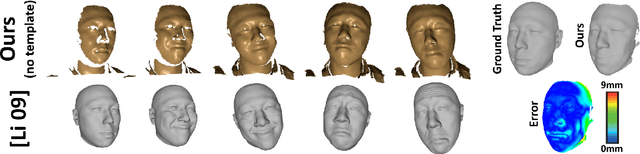
Scene reconstruction from unorganized RGB images is an important task in many computer vision applications. Multi-view Stereo (MVS) is a common solution in photogrammetry applications for the dense reconstruction of a static scene. The static scene assumption, however, limits the general applicability of MVS algorithms, as many day-to-day scenes undergo non-rigid motion, e.g., clothes, faces, or human bodies. In this paper, we open up a new challenging direction: dense 3D reconstruction of scenes with non-rigid changes observed from arbitrary, sparse, and wide-baseline views. We formulate the problem as a joint optimization of deformation and depth estimation, using deformation graphs as the underlying representation. We propose a new sparse 3D to 2D matching technique, together with a dense patch-match evaluation scheme to estimate deformation and depth with photometric consistency. We show that creating a dense 4D structure from a few RGB images with non-rigid changes is possible, and demonstrate that our method can be used to interpolate novel deformed scenes from various combinations of these deformation estimates derived from the sparse views.
VolumeDeform: Real-time Volumetric Non-rigid Reconstruction
Jul 30, 2016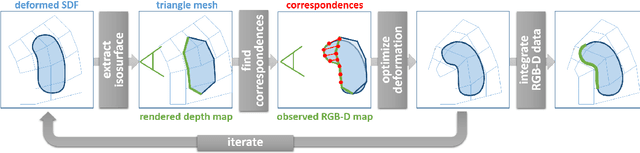

We present a novel approach for the reconstruction of dynamic geometric shapes using a single hand-held consumer-grade RGB-D sensor at real-time rates. Our method does not require a pre-defined shape template to start with and builds up the scene model from scratch during the scanning process. Geometry and motion are parameterized in a unified manner by a volumetric representation that encodes a distance field of the surface geometry as well as the non-rigid space deformation. Motion tracking is based on a set of extracted sparse color features in combination with a dense depth-based constraint formulation. This enables accurate tracking and drastically reduces drift inherent to standard model-to-depth alignment. We cast finding the optimal deformation of space as a non-linear regularized variational optimization problem by enforcing local smoothness and proximity to the input constraints. The problem is tackled in real-time at the camera's capture rate using a data-parallel flip-flop optimization strategy. Our results demonstrate robust tracking even for fast motion and scenes that lack geometric features.