 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFundamental Limits of Man-in-the-Middle Attack Detection in Model-Free Reinforcement Learning
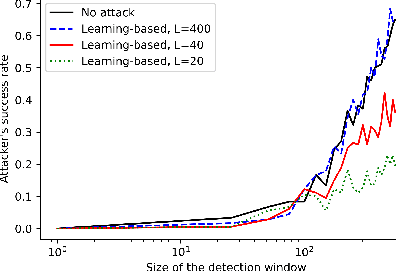
Apr 01, 2026We consider the problem of learning-based man-in-the-middle (MITM) attacks in cyber-physical systems (CPS), and extend our previously proposed Bellman Deviation Detection (BDD) framework for model-free reinforcement learning (RL). We refine the standard MDP attack model by allowing the reward function to depend on both the current and subsequent states, thereby capturing reward variations induced by errors in the adversary's transition estimate. We also derive an optimal system-identification strategy for the adversary that minimizes detectable value deviations. Further, we prove that the agent's asymptotic learning time required to secure the system scales linearly with the adversary's learning time, and that this matches the optimal lower bound. Hence, the proposed detection scheme is order-optimal in detection efficiency. Finally, we extend the framework to asynchronous and intermittent attack scenarios, where reliable detection is preserved.
Textual understanding boost in the WikiRace
Nov 13, 2025The WikiRace game, where players navigate between Wikipedia articles using only hyperlinks, serves as a compelling benchmark for goal-directed search in complex information networks. This paper presents a systematic evaluation of navigation strategies for this task, comparing agents guided by graph-theoretic structure (betweenness centrality), semantic meaning (language model embeddings), and hybrid approaches. Through rigorous benchmarking on a large Wikipedia subgraph, we demonstrate that a purely greedy agent guided by the semantic similarity of article titles is overwhelmingly effective. This strategy, when combined with a simple loop-avoidance mechanism, achieved a perfect success rate and navigated the network with an efficiency an order of magnitude better than structural or hybrid methods. Our findings highlight the critical limitations of purely structural heuristics for goal-directed search and underscore the transformative potential of large language models to act as powerful, zero-shot semantic navigators in complex information spaces.
Channel Shaping Using Beyond Diagonal Reconfigurable Intelligent Surface: Analysis, Optimization, and Enhanced Flexibility
Jul 23, 2024


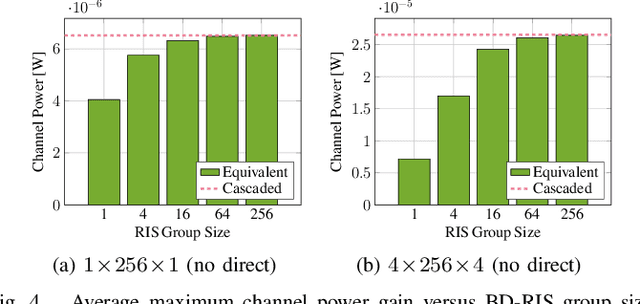
This paper investigates the capability of a passive Reconfigurable Intelligent Surface (RIS) to redistribute the singular values of point-to-point Multiple-Input Multiple-Output (MIMO) channels for achieving power and rate gains. We depart from the conventional Diagonal (D)-RIS with diagonal phase shift matrix and adopt a Beyond Diagonal (BD) architecture that offers greater wave manipulation flexibility through element-wise connections. Specifically, we first provide shaping insights by characterizing the channel singular value regions attainable by D-RIS and BD-RIS via a novel geodesic optimization. Analytical singular value bounds are then derived to explore their shaping limits in typical deployment scenarios. As a side product, we tackle BD-RIS-aided MIMO rate maximization problem by a local-optimal Alternating Optimization (AO) and a shaping-inspired low-complexity approach. Results show that compared to D-RIS, BD-RIS significantly improves the dynamic range of all channel singular values, the trade-off in manipulating them, and thus the channel power and achievable rate. Those observations become more pronounced when the number of RIS elements and MIMO dimensions increase. Of particular interest, BD-RIS is shown to activate multi-stream transmission at lower transmit power than D-RIS, hence achieving the asymptotic Degrees of Freedom (DoF) at low Signal-to-Noise Ratio (SNR) thanks to its higher flexibility of shaping the distribution of channel singular values.
Theoretical Analysis of the Radio Map Estimation Problem
Nov 07, 2023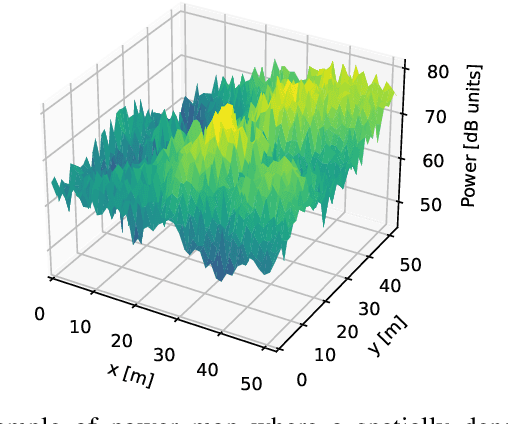

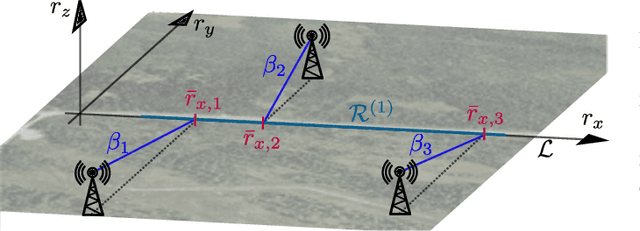
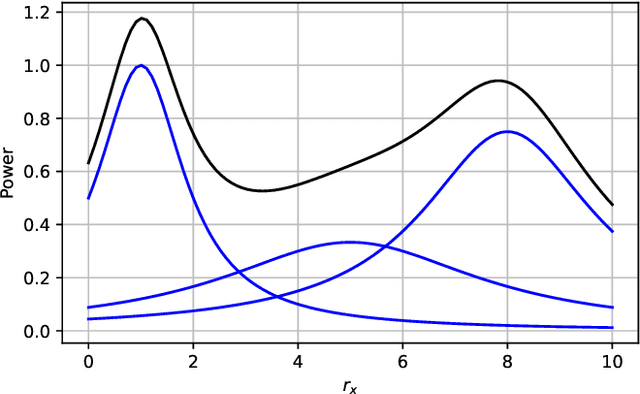
Radio map estimation (RME) constructs representations providing radio frequency metrics, such as the received signal strength, at every location of a geographic area using a set of measurements collected at multiple positions. The resulting radio maps find a wide range of applications in wireless communications, including prediction of coverage holes, network planning, resource allocation, and path planning for mobile robots. Although a vast number of estimators have been proposed, the theoretical understanding of the RME problem has not been pursued. The present work aims at filling this gap along two directions. First, the complexity of the function space of radio maps is quantified by means of lower and upper bounds on their spatial variability, which offers valuable insight into the required spatial distribution of measurements and estimators that can be used. Second, the reconstruction error for power maps in free space is upper bounded for three simple spatial interpolators, namely zeroth-order, first-order, and sinc interpolators. In view of these bounds, the proximity coefficient, which is an increasing function of the transmitted power and a decreasing function of the distance from the transmitters to the mapped region, is proposed to quantify the complexity of the RME problem. Simple numerical experiments assess the tightness of the obtained bounds and reveal the practical trade-offs associated with the considered interpolators.
Understanding the Limits of Poisoning Attacks in Episodic Reinforcement Learning
Aug 29, 2022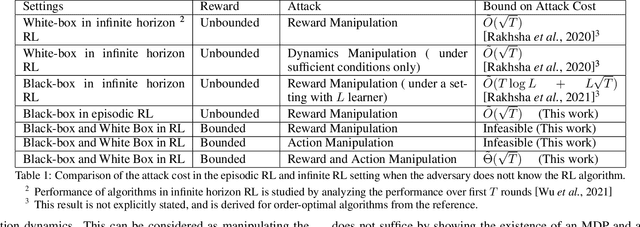
To understand the security threats to reinforcement learning (RL) algorithms, this paper studies poisoning attacks to manipulate \emph{any} order-optimal learning algorithm towards a targeted policy in episodic RL and examines the potential damage of two natural types of poisoning attacks, i.e., the manipulation of \emph{reward} and \emph{action}. We discover that the effect of attacks crucially depend on whether the rewards are bounded or unbounded. In bounded reward settings, we show that only reward manipulation or only action manipulation cannot guarantee a successful attack. However, by combining reward and action manipulation, the adversary can manipulate any order-optimal learning algorithm to follow any targeted policy with $\tilde{\Theta}(\sqrt{T})$ total attack cost, which is order-optimal, without any knowledge of the underlying MDP. In contrast, in unbounded reward settings, we show that reward manipulation attacks are sufficient for an adversary to successfully manipulate any order-optimal learning algorithm to follow any targeted policy using $\tilde{O}(\sqrt{T})$ amount of contamination. Our results reveal useful insights about what can or cannot be achieved by poisoning attacks, and are set to spur more works on the design of robust RL algorithms.
Secure-UCB: Saving Stochastic Bandits from Poisoning Attacks via Limited Data Verification
Feb 15, 2021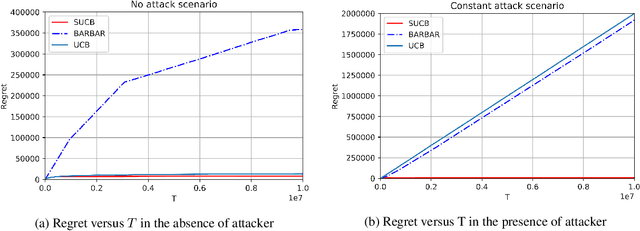
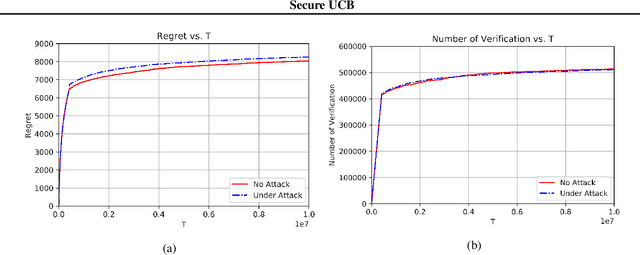
This paper studies bandit algorithms under data poisoning attacks in a bounded reward setting. We consider a strong attacker model in which the attacker can observe both the selected actions and their corresponding rewards, and can contaminate the rewards with additive noise. We show that \emph{any} bandit algorithm with regret $O(\log T)$ can be forced to suffer a regret $\Omega(T)$ with an expected amount of contamination $O(\log T)$. This amount of contamination is also necessary, as we prove that there exists an $O(\log T)$ regret bandit algorithm, specifically the classical UCB, that requires $\Omega(\log T)$ amount of contamination to suffer regret $\Omega(T)$. To combat such poising attacks, our second main contribution is to propose a novel algorithm, Secure-UCB, which uses limited \emph{verification} to access a limited number of uncontaminated rewards. We show that with $O(\log T)$ expected number of verifications, Secure-UCB can restore the order optimal $O(\log T)$ regret \emph{irrespective of the amount of contamination} used by the attacker. Finally, we prove that for any bandit algorithm, this number of verifications $O(\log T)$ is necessary to recover the order-optimal regret. We can then conclude that Secure-UCB is order-optimal in terms of both the expected regret and the expected number of verifications, and can save stochastic bandits from any data poisoning attack.
Sequential Choice Bandits with Feedback for Personalizing users' experience
Jan 05, 2021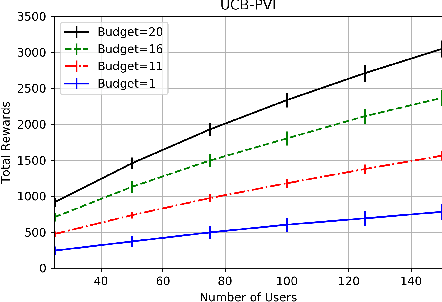
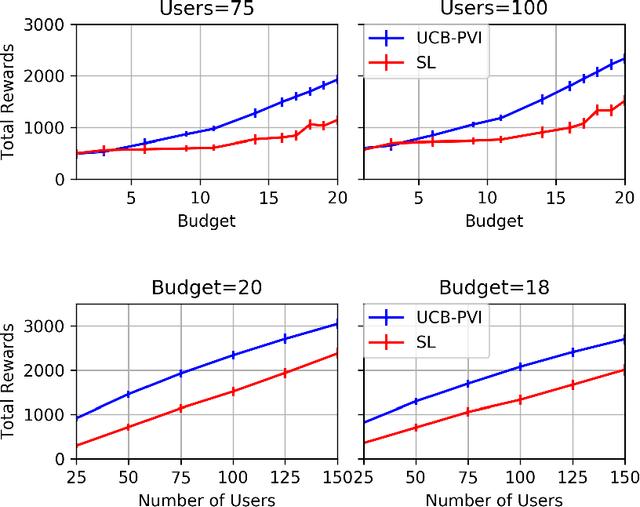
In this work, we study sequential choice bandits with feedback. We propose bandit algorithms for a platform that personalizes users' experience to maximize its rewards. For each action directed to a given user, the platform is given a positive reward, which is a non-decreasing function of the action, if this action is below the user's threshold. Users are equipped with a patience budget, and actions that are above the threshold decrease the user's patience. When all patience is lost, the user abandons the platform. The platform attempts to learn the thresholds of the users in order to maximize its rewards, based on two different feedback models describing the information pattern available to the platform at each action. We define a notion of regret by determining the best action to be taken when the platform knows that the user's threshold is in a given interval. We then propose bandit algorithms for the two feedback models and show that upper and lower bounds on the regret are of the order of $\tilde{O}(N^{2/3})$ and $\tilde\Omega(N^{2/3})$, respectively, where $N$ is the total number of users. Finally, we show that the waiting time of any user before receiving a personalized experience is uniform in $N$.
Control Barriers in Bayesian Learning of System Dynamics
Dec 29, 2020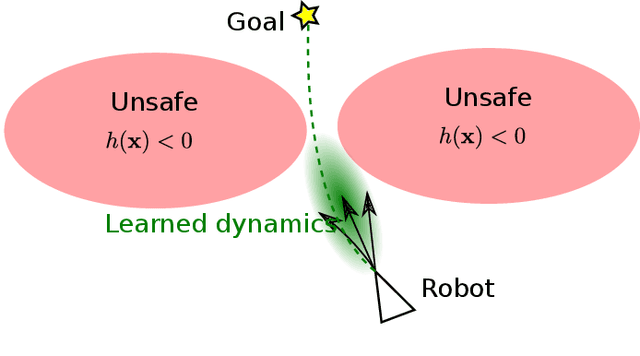
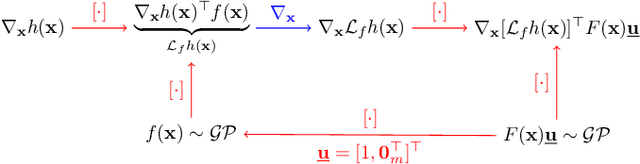
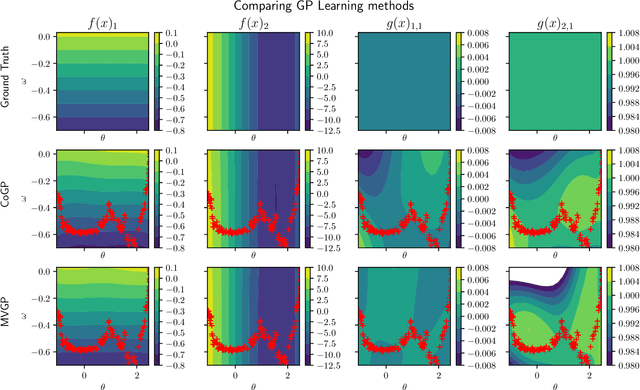
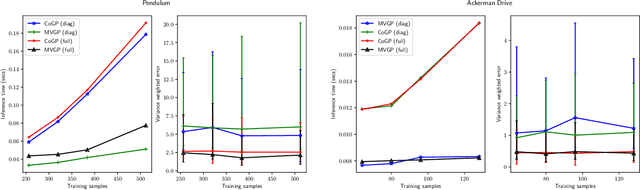
This paper focuses on learning a model of system dynamics online while satisfying safety constraints. Our objective is to avoid offline system identification or hand-specified models and allow a system to safely and autonomously estimate and adapt its own model during operation. Given streaming observations of the system state, we use Bayesian learning to obtain a distribution over the system dynamics. Specifically, we use a matrix variate Gaussian process (MVGP) regression approach with efficient covariance factorization to learn the drift and input gain terms of a nonlinear control-affine system. The MVGP distribution is then used to optimize the system behavior and ensure safety with high probability, by specifying control Lyapunov function (CLF) and control barrier function (CBF) chance constraints. We show that a safe control policy can be synthesized for systems with arbitrary relative degree and probabilistic CLF-CBF constraints by solving a second order cone program (SOCP). Finally, we extend our design to a self-triggering formulation, adaptively determining the time at which a new control input needs to be applied in order to guarantee safety.
Learning-based attacks in Cyber-Physical Systems: Exploration, Detection, and Control Cost trade-offs
Nov 21, 2020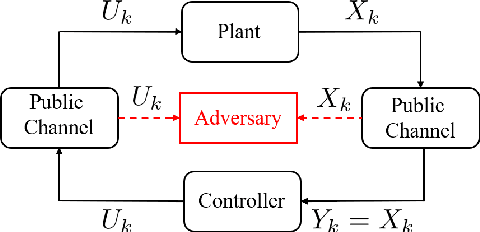
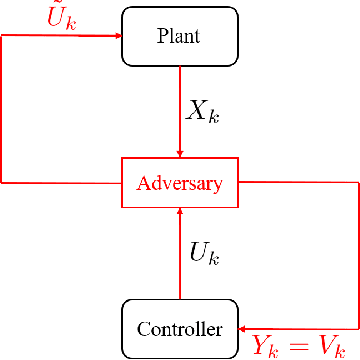
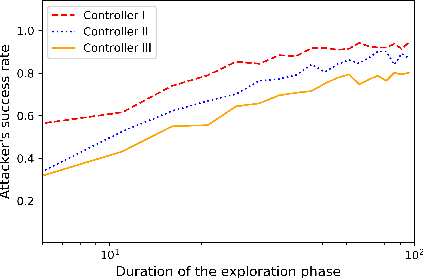
We study the problem of learning-based attacks in linear systems, where the communication channel between the controller and the plant can be hijacked by a malicious attacker. We assume the attacker learns the dynamics of the system from observations, then overrides the controller's actuation signal, while mimicking legitimate operation by providing fictitious sensor readings to the controller. On the other hand, the controller is on a lookout to detect the presence of the attacker and tries to enhance the detection performance by carefully crafting its control signals. We study the trade-offs between the information acquired by the attacker from observations, the detection capabilities of the controller, and the control cost. Specifically, we provide tight upper and lower bounds on the expected $\epsilon$-deception time, namely the time required by the controller to make a decision regarding the presence of an attacker with confidence at least $(1-\epsilon\log(1/\epsilon))$. We then show a probabilistic lower bound on the time that must be spent by the attacker learning the system, in order for the controller to have a given expected $\epsilon$-deception time. We show that this bound is also order optimal, in the sense that if the attacker satisfies it, then there exists a learning algorithm with the given order expected deception time. Finally, we show a lower bound on the expected energy expenditure required to guarantee detection with confidence at least $1-\epsilon \log(1/\epsilon)$.
Probabilistic Safety Constraints for Learned High Relative Degree System Dynamics
Dec 20, 2019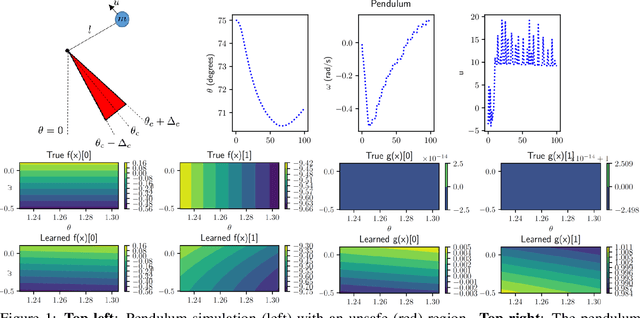
This paper focuses on learning a model of system dynamics online while satisfying safety constraints. Our motivation is to avoid offline system identification or hand-specified dynamics models and allow a system to safely and autonomously estimate and adapt its own model during online operation. Given streaming observations of the system state, we use Bayesian learning to obtain a distribution over the system dynamics. In turn, the distribution is used to optimize the system behavior and ensure safety with high probability, by specifying a chance constraint over a control barrier function.