Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Safety Constraints for Learned High Relative Degree System Dynamics
Paper and Code
Dec 20, 2019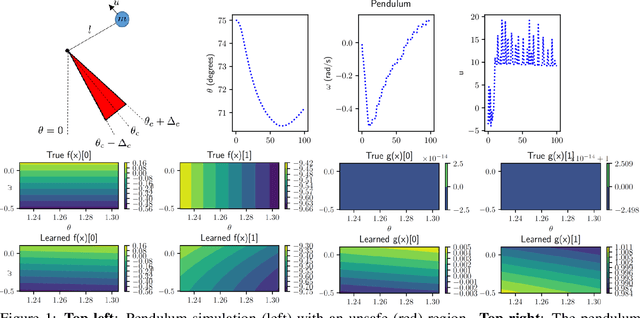
This paper focuses on learning a model of system dynamics online while satisfying safety constraints. Our motivation is to avoid offline system identification or hand-specified dynamics models and allow a system to safely and autonomously estimate and adapt its own model during online operation. Given streaming observations of the system state, we use Bayesian learning to obtain a distribution over the system dynamics. In turn, the distribution is used to optimize the system behavior and ensure safety with high probability, by specifying a chance constraint over a control barrier function.
* Under-review for acceptance in L4DC 2020
View paper on
 OpenReview
OpenReview