 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDWPP: Dynamic Window Pure Pursuit Considering Velocity and Acceleration Constraints
Jan 21, 2026Pure pursuit and its variants are widely used for mobile robot path tracking owing to their simplicity and computational efficiency. However, many conventional approaches do not explicitly account for velocity and acceleration constraints, resulting in discrepancies between commanded and actual velocities that result in overshoot and degraded tracking performance. To address this problem, this paper proposes dynamic window pure pursuit (DWPP), which fundamentally reformulates the command velocity computation process to explicitly incorporate velocity and acceleration constraints. Specifically, DWPP formulates command velocity computation in the velocity space (the $v$-$ω$ plane) and selects the command velocity as the point within the dynamic window that is closest to the line $ω= κv$. Experimental results demonstrate that DWPP avoids constraint-violating commands and achieves superior path-tracking accuracy compared with conventional pure pursuit methods. The proposed method has been integrated into the official Nav2 repository and is publicly available (https://github.com/ros-navigation/navigation2).
SumRec: A Framework for Recommendation using Open-Domain Dialogue
Feb 07, 2024Chat dialogues contain considerable useful information about a speaker's interests, preferences, and experiences.Thus, knowledge from open-domain chat dialogue can be used to personalize various systems and offer recommendations for advanced information.This study proposed a novel framework SumRec for recommending information from open-domain chat dialogue.The study also examined the framework using ChatRec, a newly constructed dataset for training and evaluation. To extract the speaker and item characteristics, the SumRec framework employs a large language model (LLM) to generate a summary of the speaker information from a dialogue and to recommend information about an item according to the type of user.The speaker and item information are then input into a score estimation model, generating a recommendation score.Experimental results show that the SumRec framework provides better recommendations than the baseline method of using dialogues and item descriptions in their original form. Our dataset and code is publicly available at https://github.com/Ryutaro-A/SumRec
Switching Head-Tail Funnel UNITER for Dual Referring Expression Comprehension with Fetch-and-Carry Tasks
Jul 14, 2023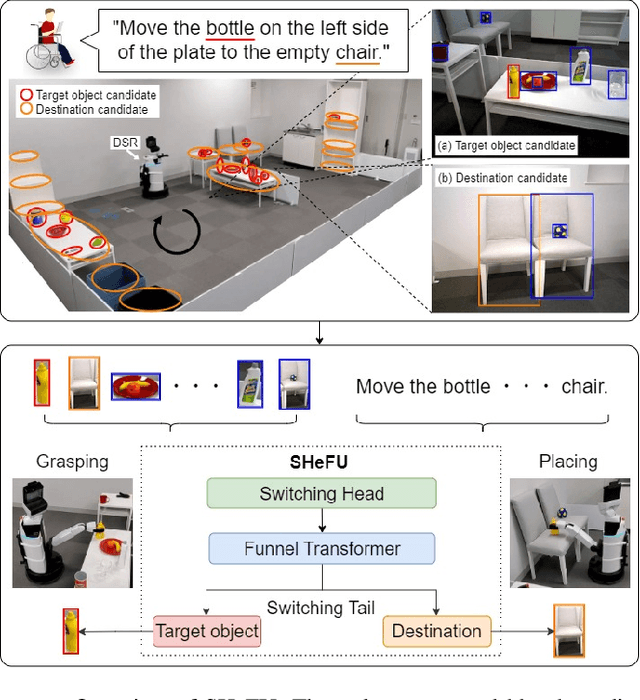
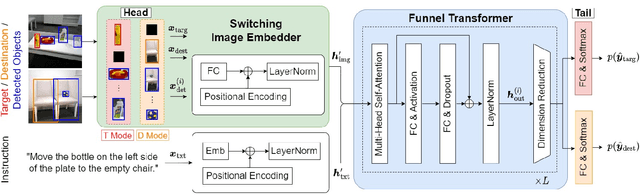
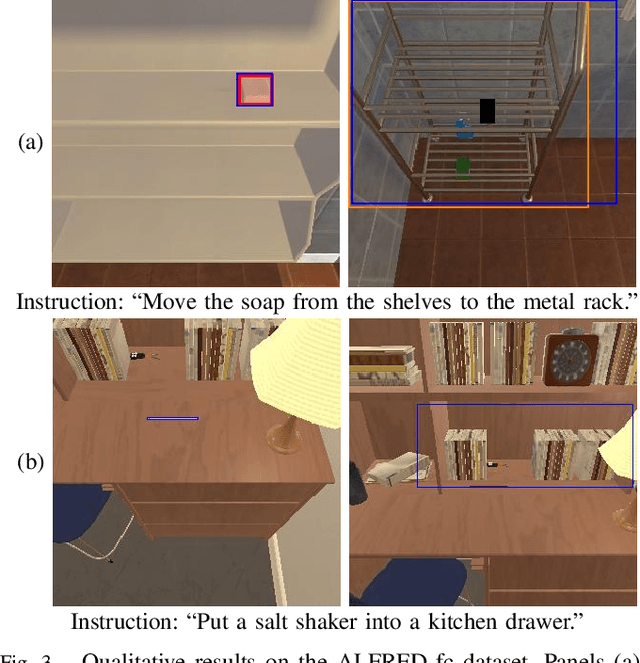
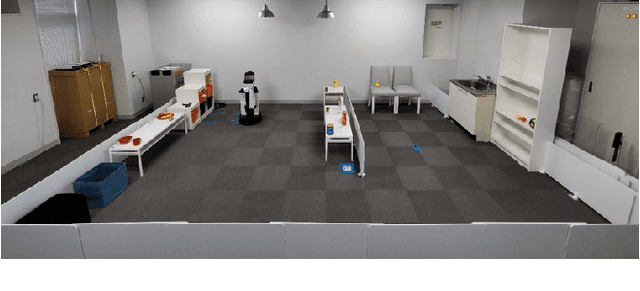
This paper describes a domestic service robot (DSR) that fetches everyday objects and carries them to specified destinations according to free-form natural language instructions. Given an instruction such as "Move the bottle on the left side of the plate to the empty chair," the DSR is expected to identify the bottle and the chair from multiple candidates in the environment and carry the target object to the destination. Most of the existing multimodal language understanding methods are impractical in terms of computational complexity because they require inferences for all combinations of target object candidates and destination candidates. We propose Switching Head-Tail Funnel UNITER, which solves the task by predicting the target object and the destination individually using a single model. Our method is validated on a newly-built dataset consisting of object manipulation instructions and semi photo-realistic images captured in a standard Embodied AI simulator. The results show that our method outperforms the baseline method in terms of language comprehension accuracy. Furthermore, we conduct physical experiments in which a DSR delivers standardized everyday objects in a standardized domestic environment as requested by instructions with referring expressions. The experimental results show that the object grasping and placing actions are achieved with success rates of more than 90%.
UnrealEgo: A New Dataset for Robust Egocentric 3D Human Motion Capture
Aug 02, 2022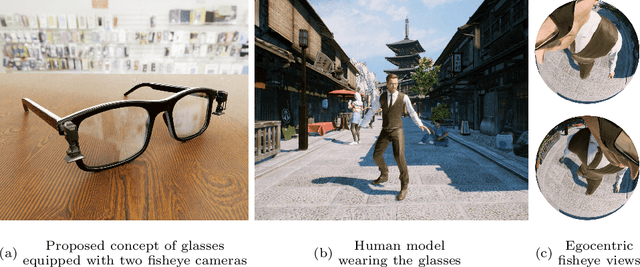
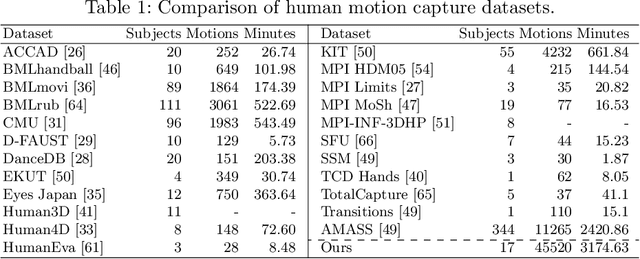

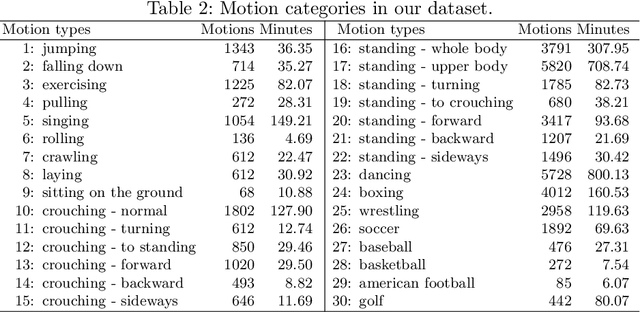
We present UnrealEgo, i.e., a new large-scale naturalistic dataset for egocentric 3D human pose estimation. UnrealEgo is based on an advanced concept of eyeglasses equipped with two fisheye cameras that can be used in unconstrained environments. We design their virtual prototype and attach them to 3D human models for stereo view capture. We next generate a large corpus of human motions. As a consequence, UnrealEgo is the first dataset to provide in-the-wild stereo images with the largest variety of motions among existing egocentric datasets. Furthermore, we propose a new benchmark method with a simple but effective idea of devising a 2D keypoint estimation module for stereo inputs to improve 3D human pose estimation. The extensive experiments show that our approach outperforms the previous state-of-the-art methods qualitatively and quantitatively. UnrealEgo and our source codes are available on our project web page.
* 21 pages, 10 figures, 10 tables; project page: https://4dqv.mpi-inf.mpg.de/UnrealEgo/