 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnrealEgo: A New Dataset for Robust Egocentric 3D Human Motion Capture
Paper and Code
Aug 02, 2022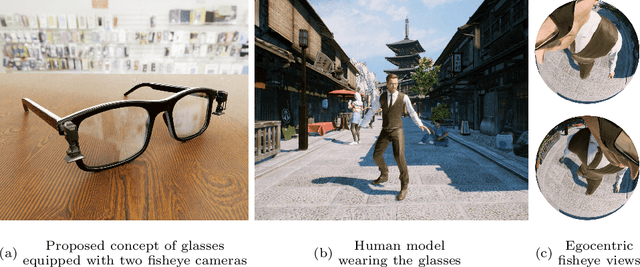
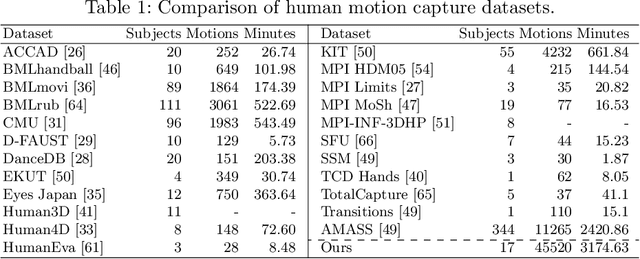

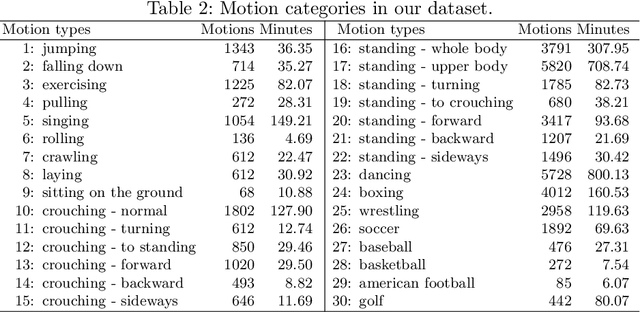
We present UnrealEgo, i.e., a new large-scale naturalistic dataset for egocentric 3D human pose estimation. UnrealEgo is based on an advanced concept of eyeglasses equipped with two fisheye cameras that can be used in unconstrained environments. We design their virtual prototype and attach them to 3D human models for stereo view capture. We next generate a large corpus of human motions. As a consequence, UnrealEgo is the first dataset to provide in-the-wild stereo images with the largest variety of motions among existing egocentric datasets. Furthermore, we propose a new benchmark method with a simple but effective idea of devising a 2D keypoint estimation module for stereo inputs to improve 3D human pose estimation. The extensive experiments show that our approach outperforms the previous state-of-the-art methods qualitatively and quantitatively. UnrealEgo and our source codes are available on our project web page.