 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlimp-based Crime Scene Analysis
Apr 22, 2025



To tackle the crucial problem of crime, evidence at indoor crime scenes must be analyzed before it becomes contaminated or degraded. Here, as an application of artificial intelligence (AI), computer vision, and robotics, we explore how a blimp could be designed as a kind of "floating camera" to drift over and record evidence with minimal disturbance. In particular, rapid prototyping is used to develop a proof-of-concept to gain insight into what such blimps could do, manually piloted or semi-autonomously. As a result, we show the feasibility of attaching various components to an indoor blimp, and confirm our basic premise, that blimps can sense evidence without producing much wind. Some additional suggestions--regarding mapping, sensing, and path-finding--aim to stimulate the flow of ideas for further exploration.
Magic in Human-Robot Interaction (HRI)
Mar 04, 2025"Magic" is referred to here and there in the robotics literature, from "magical moments" afforded by a mobile bubble machine, to "spells" intended to entertain and motivate children--but what exactly could this concept mean for designers? Here, we present (1) some theoretical discussion on how magic could inform interaction designs based on reviewing the literature, followed by (2) a practical description of using such ideas to develop a simplified prototype, which received an award in an international robot magic competition. Although this topic can be considered unusual and some negative connotations exist (e.g., unrealistic thinking can be referred to as magical), our results seem to suggest that magic, in the experiential, supernatural, and illusory senses of the term, could be useful to consider in various robot design contexts, also for artifacts like home assistants and autonomous vehicles--thus, inviting further discussion and exploration.
Nano Drone-based Indoor Crime Scene Analysis
Feb 28, 2025



Technologies such as robotics, Artificial Intelligence (AI), and Computer Vision (CV) can be applied to crime scene analysis (CSA) to help protect lives, facilitate justice, and deter crime, but an overview of the tasks that can be automated has been lacking. Here we follow a speculate prototyping approach: First, the STAIR tool is used to rapidly review the literature and identify tasks that seem to have not received much attention, like accessing crime sites through a window, mapping/gathering evidence, and analyzing blood smears. Secondly, we present a prototype of a small drone that implements these three tasks with 75%, 85%, and 80% performance, to perform a minimal analysis of an indoor crime scene. Lessons learned are reported, toward guiding next work in the area.
Designing Robots to Help Women
Apr 05, 2024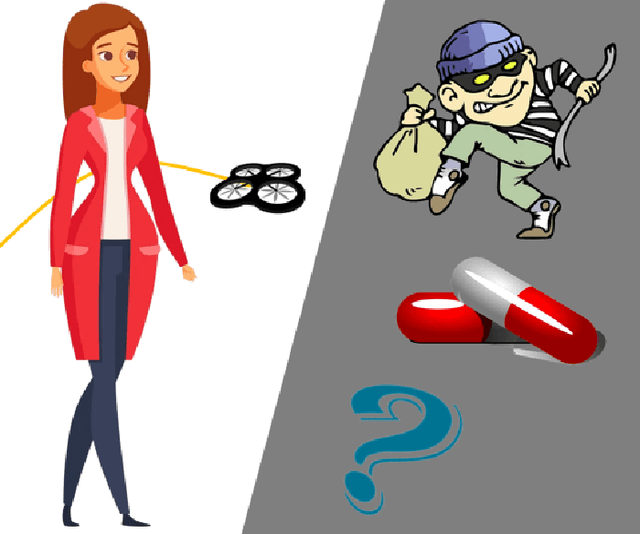

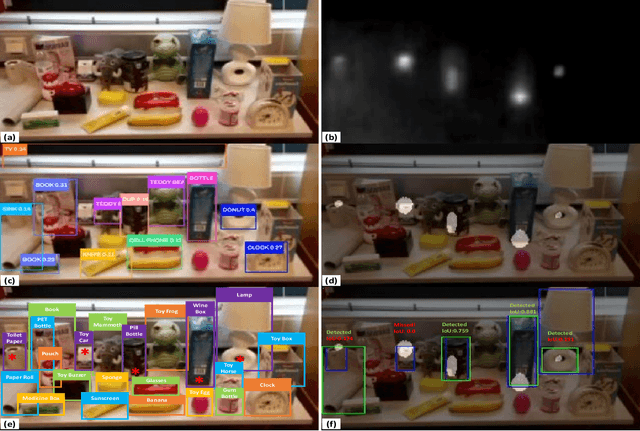
Robots are being designed to help people in an increasing variety of settings--but seemingly little attention has been given so far to the specific needs of women, who represent roughly half of the world's population but are highly underrepresented in robotics. Here we used a speculative prototyping approach to explore this expansive design space: First, we identified some potential challenges of interest, including crimes and illnesses that disproportionately affect women, as well as potential opportunities for designers, which were visualized in five sketches. Then, one of the sketched scenarios was further explored by developing a prototype, of a robotic helper drone equipped with computer vision to detect hidden cameras that could be used to spy on women. While object detection introduced some errors, hidden cameras were identified with a reasonable accuracy of 80\% (Intersection over Union (IoU) score: 0.40). Our aim is that the identified challenges and opportunities could help spark discussion and inspire designers, toward realizing a safer, more inclusive future through responsible use of technology.
"Robot Steganography"?: Opportunities and Challenges
Aug 02, 2021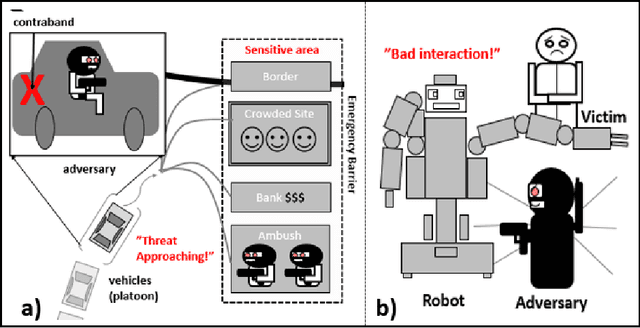
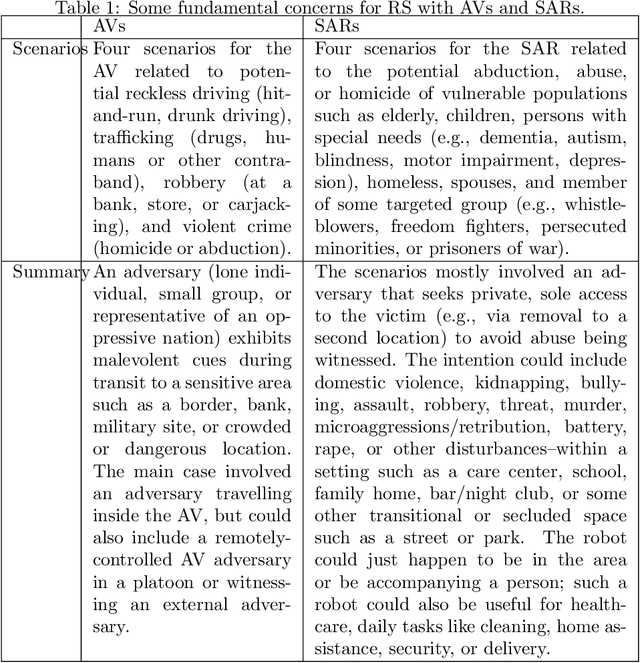
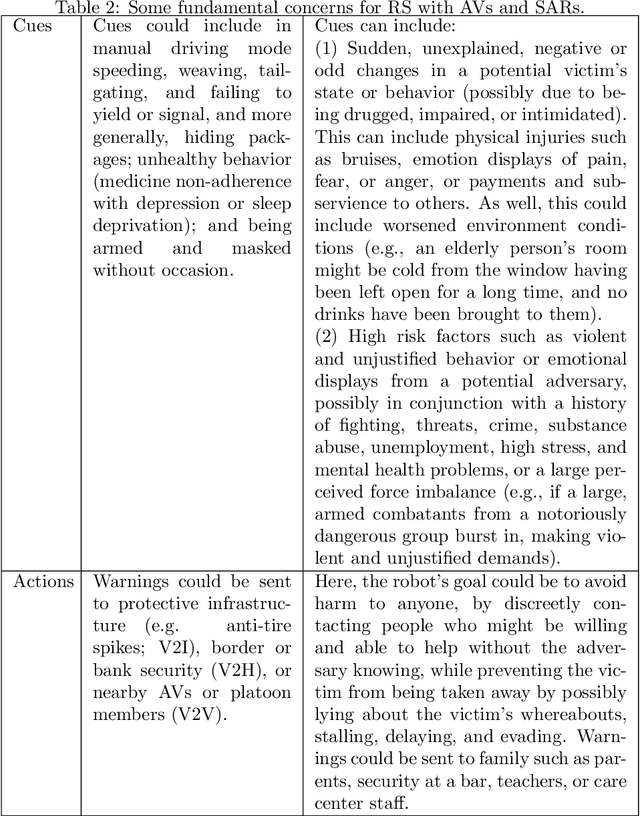
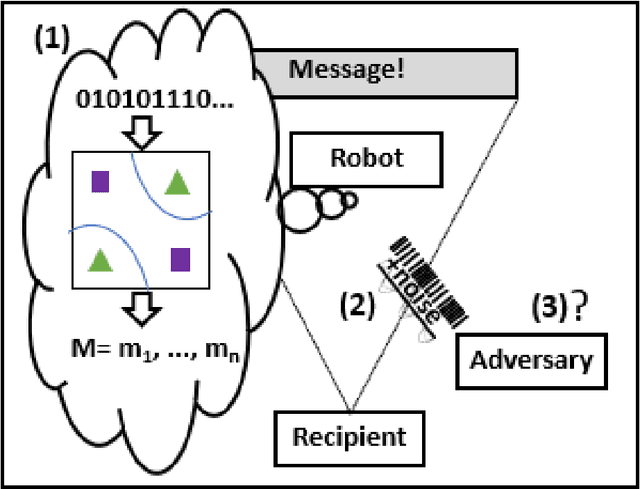
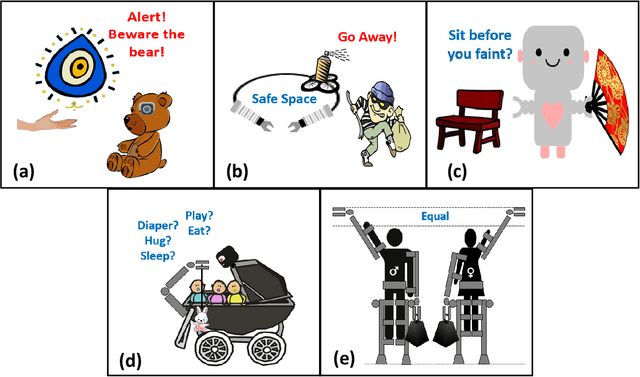
Robots are being designed to communicate with people in various public and domestic venues in a helpful, discreet way. Here, we use a speculative approach to shine light on a new concept of robot steganography (RS), that a robot could seek to help vulnerable populations by discreetly warning of potential threats. We first identify some potentially useful scenarios for RS related to safety and security -- concerns that are estimated to cost the world trillions of dollars each year -- with a focus on two kinds of robots, an autonomous vehicle (AV) and a socially assistive humanoid robot (SAR). Next, we propose that existing, powerful, computer-based steganography (CS) approaches can be adopted with little effort in new contexts (SARs), while also pointing out potential benefits of human-like steganography (HS): although less efficient and robust than CS, HS represents a currently-unused form of RS that could also be used to avoid requiring computers or detection by more technically advanced adversaries. This analysis also introduces some unique challenges of RS that arise from message generation, indirect perception, and effects of perspective. For this, we explore some related theoretical and practical concerns for selecting carrier signals and generating messages, also making available some code and a video demo. Finally, we report on checking the current feasibility of the RS concept via a simplified user study, confirming that messages can be hidden in a robot's behaviors. The immediate implication is that RS could help to improve people's lives and mitigate some costly problems -- suggesting the usefulness of further discussion, ideation, and consideration by designers.
Avoiding Improper Treatment of Persons with Dementia by Care Robots
May 08, 2020
The phrase "most cruel and revolting crimes" has been used to describe some poor historical treatment of vulnerable impaired persons by precisely those who should have had the responsibility of protecting and helping them. We believe we might be poised to see history repeat itself, as increasingly human-like aware robots become capable of engaging in behavior which we would consider immoral in a human--either unknowingly or deliberately. In the current paper we focus in particular on exploring some potential dangers affecting persons with dementia (PWD), which could arise from insufficient software or external factors, and describe a proposed solution involving rich causal models and accountability measures: Specifically, the Consequences of Needs-driven Dementia-compromised Behaviour model (C-NDB) could be adapted to be used with conversation topic detection, causal networks and multi-criteria decision making, alongside reports, audits, and deterrents. Our aim is that the considerations raised could help inform the design of care robots intended to support well-being in PWD.
* 4 pages. Published. (Submitted: Jan. 22, 2019; Accepted: Jan. 30, 2019; Camera-ready submitted: Feb. 6, 2019.)
Robot art, in the eye of the beholder?: Personalization through self-disclosure facilitates visual communication of emotions in representational art
May 08, 2020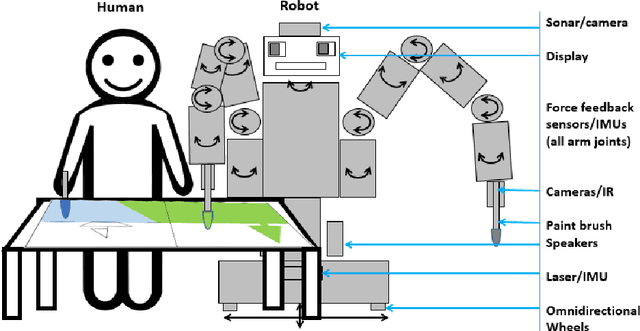
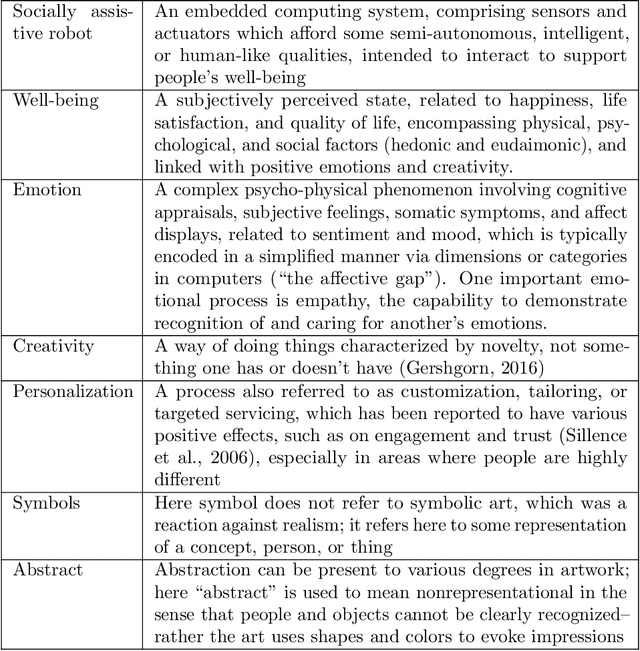
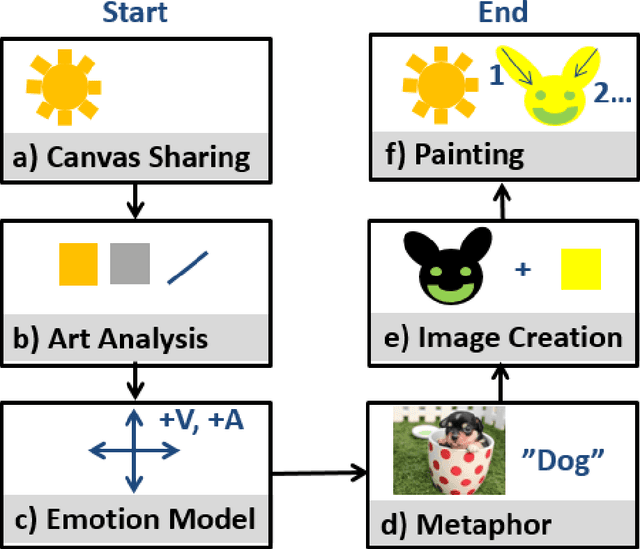
Socially assistive robots could help to support people's well-being in contexts such as art therapy where human therapists are scarce, by making art such as paintings together with people in a way that is emotionally contingent and creative. However, current art-making robots are typically either contingent, controlled as a tool by a human artist, or creative, programmed to paint independently, possibly because some complex and idiosyncratic concepts related to art, such as emotion and creativity, are not yet well understood. For example, the role of personalized taste in forming beauty evaluations has been studied in empirical aesthetics, but how to generate art that appears to an individual to express certain emotions such as happiness or sadness is less clear. In the current article, a collaborative prototyping/Wizard of Oz approach was used to explore generic robot art-making strategies and personalization of art via an open-ended emotion profile intended to identify tricky concepts. As a result of conducting an exploratory user study, participants indicated some preference for a robot art-making strategy involving "visual metaphors" to balance exogenous and endogenous components, and personalized representational sketches were reported to convey emotion more clearly than generic sketches. The article closes by discussing personalized abstract art as well as suggestions for richer art-making strategies and user models. Thus, the main conceptual advance of the current work lies in suggesting how an interactive robot can visually express emotions through personalized art; the general aim is that this could help to inform next steps in this promising area and facilitate technological acceptance of robots in everyday human environments.
Exercising with an "Iron Man": Design for a Robot Exercise Coach for Persons with Dementia
Sep 26, 2019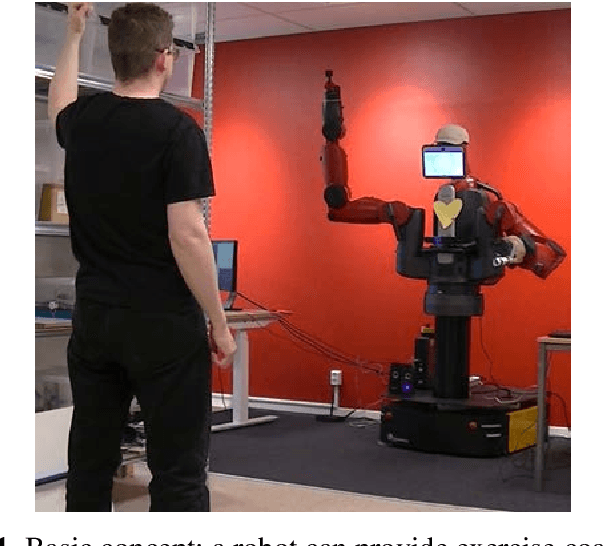
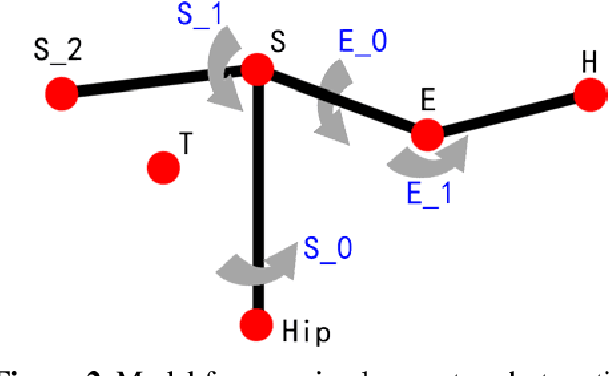
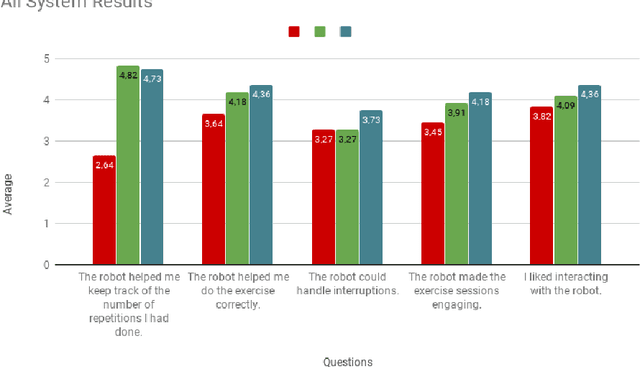
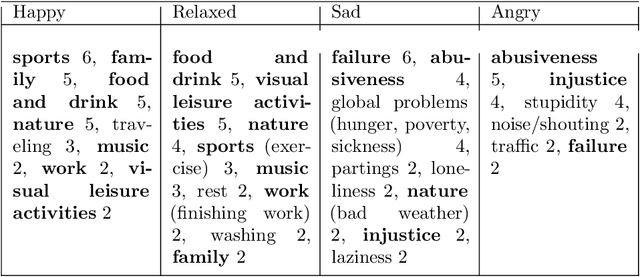
Socially assistive robots are increasingly being designed to interact with humans in various therapeutical scenarios. We believe that one useful scenario is providing exercise coaching for Persons with Dementia (PwD), which involves unique challenges related to memory and communication. We present a design for a robot that can seek to help a PWD to conduct exercises by recognizing behaviors and providing feedback, in an online, multimodal, and engaging way. Additionally, in line with a mid-fidelity prototyping approach, we report on some feedback from an exploratory user study using a Baxter robot, which provided some confirmation of the usefulness of the general scenario; furthermore, the results suggested the degree of a robot's feedback could be tailored to provide impressions of attentiveness or fun. Limitations and possibilities for future improvement are outlined, touching on deep learning and haptic feedback, toward informing next designs.
Exploring home robot capabilities by medium fidelity prototyping
Oct 09, 2017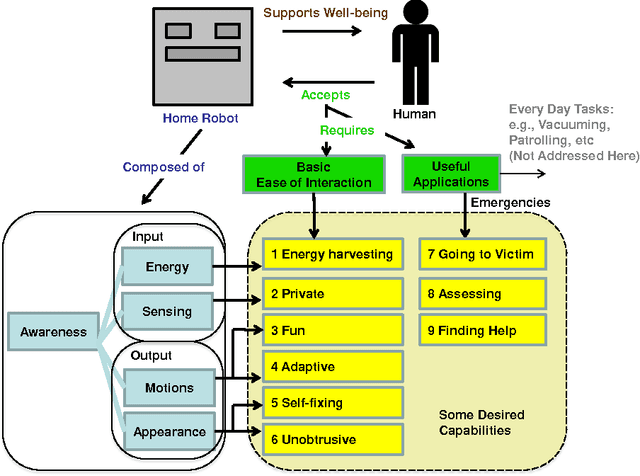
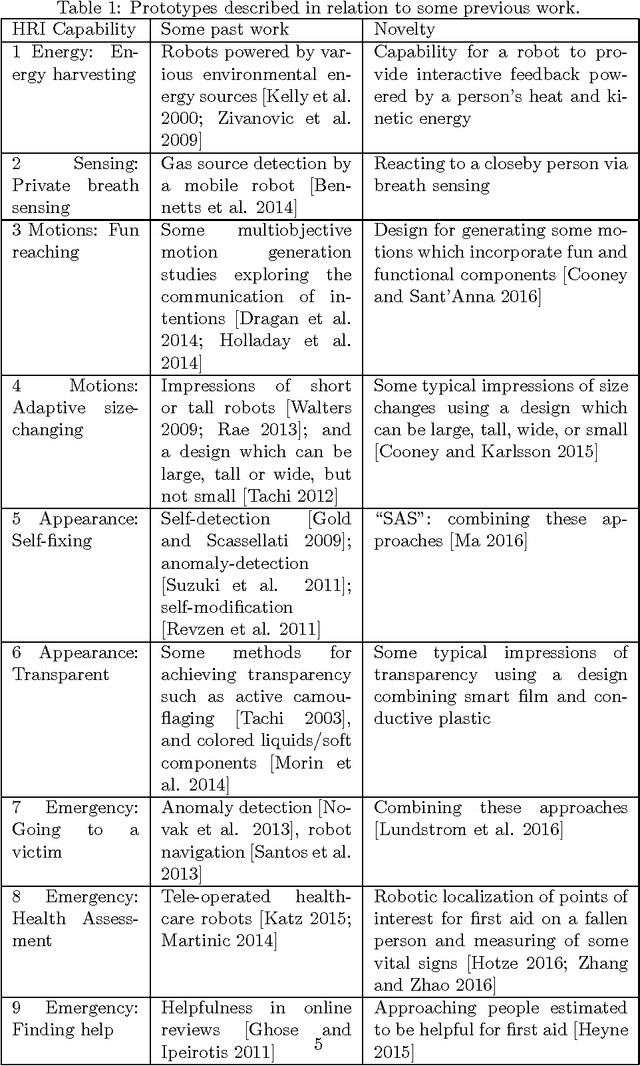
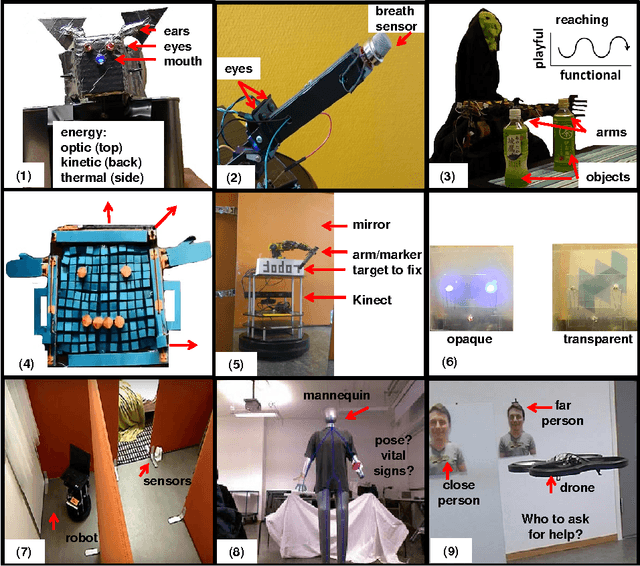
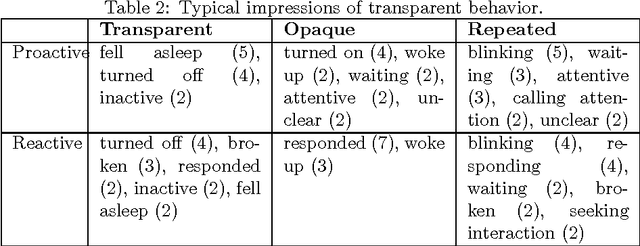
In order for autonomous robots to be able to support people's well-being in homes and everyday environments, new interactive capabilities will be required, as exemplified by the soft design used for Disney's recent robot character Baymax in popular fiction. Home robots will be required to be easy to interact with and intelligent--adaptive, fun, unobtrusive and involving little effort to power and maintain--and capable of carrying out useful tasks both on an everyday level and during emergencies. The current article adopts an exploratory medium fidelity prototyping approach for testing some new robotic capabilities in regard to recognizing people's activities and intentions and behaving in a way which is transparent to people. Results are discussed with the aim of informing next designs.