 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Robotics Reinforced by Collective Perception for Traffic Moderation
May 12, 2026Collisions at non-line-of-sight (NLOS) intersections remain a major safety concern because drivers have limited visibility of approaching traffic. V2X based warnings can reduce these risks, yet many vehicles are not equipped with V2X and drivers may ignore in vehicle alerts. Collective perception (CP) can compensate for low V2X penetration by extending the awareness of connected vehicles, but it cannot influence unconnected vehicles. To fill this gap, our work introduces a complementary concept that adds a cooperative humanoid robot as an active traffic moderator capable of physically stopping a vehicle that attempts to merge into an unseen traffic stream. The system operates on two parallel perception pathways. A dual camera infrastructure unit detects the position, speed and motion of approaching vehicles and transmits this information to the robot as a collective perception message (CPM). The robot also receives cooperative awareness messages (CAM) from connected vehicles through its onboard V2X unit and can act as a relay for decentralized environmental notification messages (DENM) when safety events originate elsewhere along the road. A fusion module combines these streams to maintain a robust real time view of the main road. A Zone of Danger (ZoD) is defined and used to predict whether an approaching vehicle creates a collision risk for a merging road user. When such a risk is detected, the robot issues a human-like STOP gesture and blocks the merging path until the hazard disappears. The full system was deployed at the Future Mobility Park (FMP) in Rotterdam. Experiments show that the combined vision and V2X perception allows the robot to detect approaching vehicles early, predict hazards reliably and prevent unsafe merges in real world NLOS conditions.
TriBand-BEV: Real-Time LiDAR-Only 3D Pedestrian Detection via Height-Aware BEV and High-Resolution Feature Fusion
May 12, 2026Safe autonomous agents and mobile robots need fast real time 3D perception, especially for vulnerable road users (VRUs) such as pedestrians. We introduce a new bird's eye view (BEV) encoding, which maps the full 3D LiDAR point cloud into a light-weight 2D BEV tensor with three height bands. We explicitly reformulate 3D detection as a 2D detection problem and then reconstruct 3D boxes from the BEV outputs. A single network detects cars, pedestrians, and cyclists in one pass. The backbone uses area attention at deep stages, a hierarchical bidirectional neck over P1 to P4 fuses context and detail, and the head predicts oriented boxes with distribution focal learning for side offsets and a rotated IoU loss. Training applies a small vertical re bin and a mild reflectance jitter in channel space to resist memorization. We use an interquartile range (IQR) filter to remove noisy and outlier LiDAR points during 3D reconstruction. On KITTI dataset, TriBand-BEV attains 58.7/52.6/47.2 pedestrian BEV AP(%) for easy, moderate, and hard at 49 FPS on a single consumer GPU, surpassing Complex-YOLO, with gains of +12.6%, +7.5%, and +3.1%. Qualitative scenes show stable detection under occlusion. The pipeline is compact and ready for real time robotic deployment. Our source code is publicly available on GitHub.
Multi-Robot Coordination in V2X Environments
May 07, 2026This paper presents a Vehicle-to-Everything (V2X) communication framework that enables decentralized cooperation among social robots operating in complex urban traffic environments. Building on ETSI Cooperative Awareness and Maneuver Coordination services, the framework introduces two robot-centric facility-layer services: the Robot Awareness Service (RAS) and the Robot Maneuver Coordination Service (RMCS), realized through the Robot Awareness Message (RAM) and the Robot Maneuver Coordination Message (RMCM), respectively. RAS enables role-aware, task-oriented robot awareness while integrating externally detected Vulnerable Road Users (VRUs), including non-V2X pedestrians, into cooperative awareness. RMCS supports event-driven, low-latency coordination of robot maneuvers under explicitly established roles, without centralized infrastructure or prior pairing. A real-world proof of concept demonstrates deterministic multi-robot coordination between a humanoid robot and a quadrupedal robot assisting a pedestrian during a road-crossing scenario, governed by a formally specified finite-state coordination model. Complementary simulations evaluate robot-mediated VRU clustering in mixed V2X environments, showing that RAS-based clustering integrates non-V2X VRUs in safety-critical areas while reducing redundant transmissions from V2X-enabled VRUs, thereby lowering channel load. Together, the proposed services provide a scalable and standards-aligned foundation for integrating cooperative robots into future Connected, Cooperative, and Automated Mobility ecosystems.
Li-ViP3D++: Query-Gated Deformable Camera-LiDAR Fusion for End-to-End Perception and Trajectory Prediction
Jan 28, 2026End-to-end perception and trajectory prediction from raw sensor data is one of the key capabilities for autonomous driving. Modular pipelines restrict information flow and can amplify upstream errors. Recent query-based, fully differentiable perception-and-prediction (PnP) models mitigate these issues, yet the complementarity of cameras and LiDAR in the query-space has not been sufficiently explored. Models often rely on fusion schemes that introduce heuristic alignment and discrete selection steps which prevent full utilization of available information and can introduce unwanted bias. We propose Li-ViP3D++, a query-based multimodal PnP framework that introduces Query-Gated Deformable Fusion (QGDF) to integrate multi-view RGB and LiDAR in query space. QGDF (i) aggregates image evidence via masked attention across cameras and feature levels, (ii) extracts LiDAR context through fully differentiable BEV sampling with learned per-query offsets, and (iii) applies query-conditioned gating to adaptively weight visual and geometric cues per agent. The resulting architecture jointly optimizes detection, tracking, and multi-hypothesis trajectory forecasting in a single end-to-end model. On nuScenes, Li-ViP3D++ improves end-to-end behavior and detection quality, achieving higher EPA (0.335) and mAP (0.502) while substantially reducing false positives (FP ratio 0.147), and it is faster than the prior Li-ViP3D variant (139.82 ms vs. 145.91 ms). These results indicate that query-space, fully differentiable camera-LiDAR fusion can increase robustness of end-to-end PnP without sacrificing deployability.
ROBOPOL: Social Robotics Meets Vehicular Communications for Cooperative Automated Driving
Dec 30, 2025On the way towards full autonomy, sharing roads between automated vehicles and human actors in so-called mixed traffic is unavoidable. Moreover, even if all vehicles on the road were autonomous, pedestrians would still be crossing the streets. We propose social robots as moderators between autonomous vehicles and vulnerable road users (VRU). To this end, we identify four enablers requiring integration: (1) advanced perception, allowing the robot to see the environment; (2) vehicular communications allowing connected vehicles to share intentions and the robot to send guiding commands; (3) social human-robot interaction allowing the robot to effectively communicate with VRUs and drivers; (4) formal specification allowing the robot to understand traffic and plan accordingly. This paper presents an overview of the key enablers and report on a first proof-of-concept integration of the first three enablers envisioning a social robot advising pedestrians in scenarios with a cooperative automated e-bike.
VALISENS: A Validated Innovative Multi-Sensor System for Cooperative Automated Driving
May 11, 2025Perception is a core capability of automated vehicles and has been significantly advanced through modern sensor technologies and artificial intelligence. However, perception systems still face challenges in complex real-world scenarios. To improve robustness against various external factors, multi-sensor fusion techniques are essential, combining the strengths of different sensor modalities. With recent developments in Vehicle-to-Everything (V2X communication, sensor fusion can now extend beyond a single vehicle to a cooperative multi-agent system involving Connected Automated Vehicle (CAV) and intelligent infrastructure. This paper presents VALISENS, an innovative multi-sensor system distributed across multiple agents. It integrates onboard and roadside LiDARs, radars, thermal cameras, and RGB cameras to enhance situational awareness and support cooperative automated driving. The thermal camera adds critical redundancy for perceiving Vulnerable Road User (VRU), while fusion with roadside sensors mitigates visual occlusions and extends the perception range beyond the limits of individual vehicles. We introduce the corresponding perception module built on this sensor system, which includes object detection, tracking, motion forecasting, and high-level data fusion. The proposed system demonstrates the potential of cooperative perception in real-world test environments and lays the groundwork for future Cooperative Intelligent Transport Systems (C-ITS) applications.
Systematic Literature Review on Vehicular Collaborative Perception -- A Computer Vision Perspective
Apr 06, 2025The effectiveness of autonomous vehicles relies on reliable perception capabilities. Despite significant advancements in artificial intelligence and sensor fusion technologies, current single-vehicle perception systems continue to encounter limitations, notably visual occlusions and limited long-range detection capabilities. Collaborative Perception (CP), enabled by Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) communication, has emerged as a promising solution to mitigate these issues and enhance the reliability of autonomous systems. Beyond advancements in communication, the computer vision community is increasingly focusing on improving vehicular perception through collaborative approaches. However, a systematic literature review that thoroughly examines existing work and reduces subjective bias is still lacking. Such a systematic approach helps identify research gaps, recognize common trends across studies, and inform future research directions. In response, this study follows the PRISMA 2020 guidelines and includes 106 peer-reviewed articles. These publications are analyzed based on modalities, collaboration schemes, and key perception tasks. Through a comparative analysis, this review illustrates how different methods address practical issues such as pose errors, temporal latency, communication constraints, domain shifts, heterogeneity, and adversarial attacks. Furthermore, it critically examines evaluation methodologies, highlighting a misalignment between current metrics and CP's fundamental objectives. By delving into all relevant topics in-depth, this review offers valuable insights into challenges, opportunities, and risks, serving as a reference for advancing research in vehicular collaborative perception.
Magic in Human-Robot Interaction (HRI)
Mar 04, 2025"Magic" is referred to here and there in the robotics literature, from "magical moments" afforded by a mobile bubble machine, to "spells" intended to entertain and motivate children--but what exactly could this concept mean for designers? Here, we present (1) some theoretical discussion on how magic could inform interaction designs based on reviewing the literature, followed by (2) a practical description of using such ideas to develop a simplified prototype, which received an award in an international robot magic competition. Although this topic can be considered unusual and some negative connotations exist (e.g., unrealistic thinking can be referred to as magical), our results seem to suggest that magic, in the experiential, supernatural, and illusory senses of the term, could be useful to consider in various robot design contexts, also for artifacts like home assistants and autonomous vehicles--thus, inviting further discussion and exploration.
The Components of Collaborative Joint Perception and Prediction -- A Conceptual Framework
Jan 27, 2025



Connected Autonomous Vehicles (CAVs) benefit from Vehicle-to-Everything (V2X) communication, which enables the exchange of sensor data to achieve Collaborative Perception (CP). To reduce cumulative errors in perception modules and mitigate the visual occlusion, this paper introduces a new task, Collaborative Joint Perception and Prediction (Co-P&P), and provides a conceptual framework for its implementation to improve motion prediction of surrounding objects, thereby enhancing vehicle awareness in complex traffic scenarios. The framework consists of two decoupled core modules, Collaborative Scene Completion (CSC) and Joint Perception and Prediction (P&P) module, which simplify practical deployment and enhance scalability. Additionally, we outline the challenges in Co-P&P and discuss future directions for this research area.
Towards Cooperative VRUs: Optimal Positioning Sampling for Pedestrian Awareness Messages
Dec 21, 2023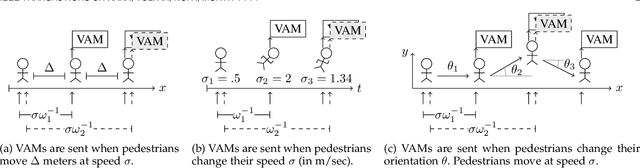
Road safety is the main motivation for Cooperative Intelligent Transport Systems (C-ITS) in general, and vehicular communications (V2X) technology in particular. The V2X-based Vulnerable Road User (VRU) protection is an approach that relies on the persistent broadcasting of "beacon" awareness messages by a VRU mobile device. To this end the European Telecommunications Standards Institute (ETSI) has specified the Vulnerable Road User Awareness Message (VAM) as well as the overall ITS-G5 protocol stack enabling a variety of the V2X applications. This article studies how often pedestrians (a type of VRU) should check their position to issue a VAM. To that end, we characterize the rate at which pedestrians generate VAMs leveraging a recognized mobility model, and formulate an optimization problem to minimize the time elapsed between VAMs. We propose an algorithm to solve the problem in 802.11p and assess its accuracy through numerical and simulation campaigns. Results evidence the accuracy of our VAM rate characterization, and evidence that we decrease ETSI positioning sampling rate by more than 30%. On top, our solution decreases the time between VAMs, and increases the packet delivery ratio. In other words, our approach increases the pedestrians safety while reducing the battery consumption of mobile devices.