 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring home robot capabilities by medium fidelity prototyping
Paper and Code
Oct 09, 2017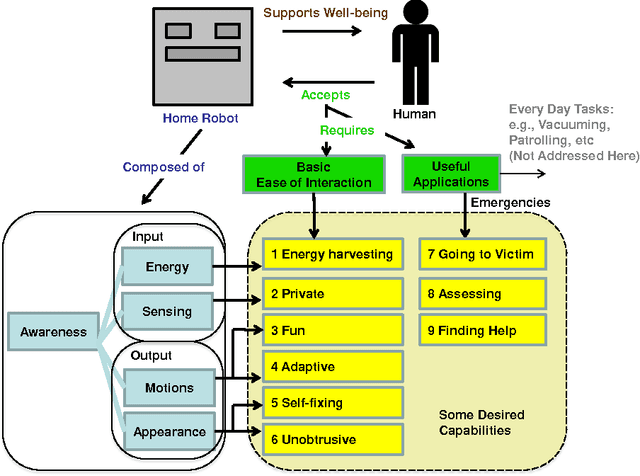
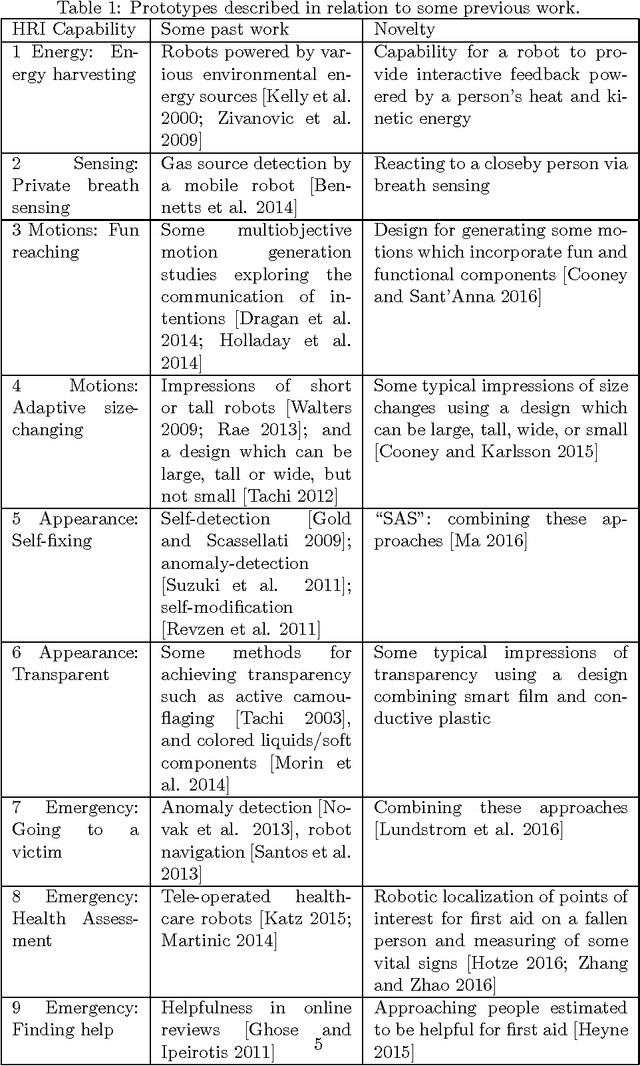
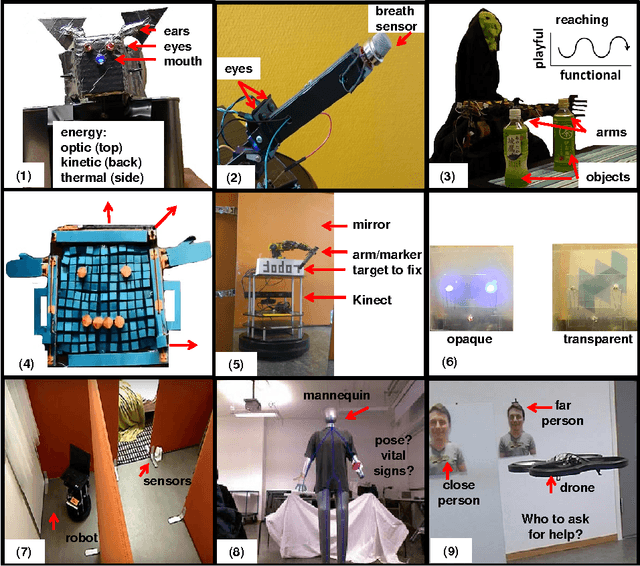
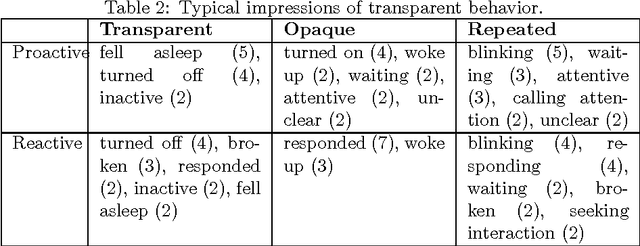
In order for autonomous robots to be able to support people's well-being in homes and everyday environments, new interactive capabilities will be required, as exemplified by the soft design used for Disney's recent robot character Baymax in popular fiction. Home robots will be required to be easy to interact with and intelligent--adaptive, fun, unobtrusive and involving little effort to power and maintain--and capable of carrying out useful tasks both on an everyday level and during emergencies. The current article adopts an exploratory medium fidelity prototyping approach for testing some new robotic capabilities in regard to recognizing people's activities and intentions and behaving in a way which is transparent to people. Results are discussed with the aim of informing next designs.