 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning Robots to Help Women
Apr 05, 2024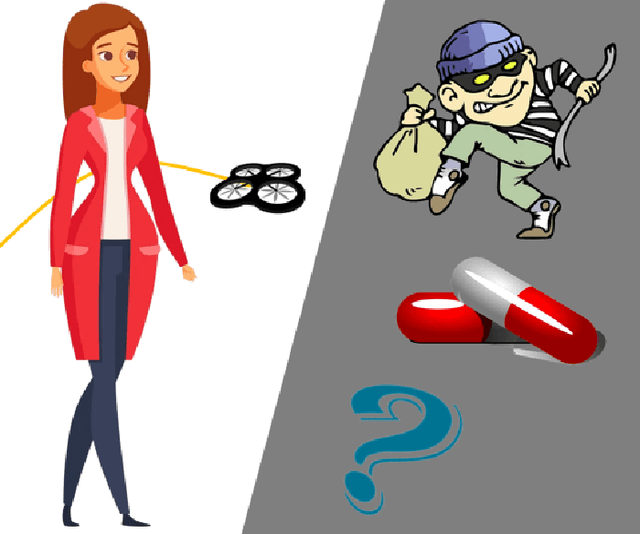
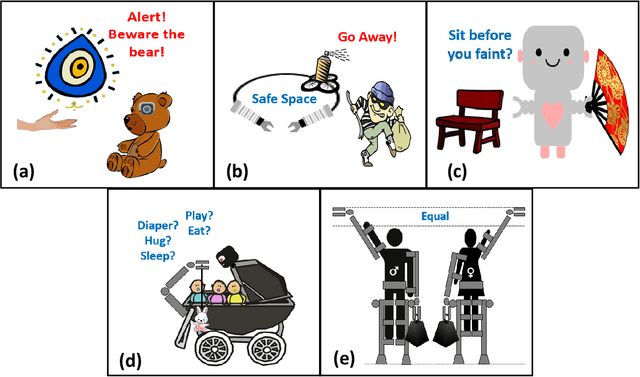

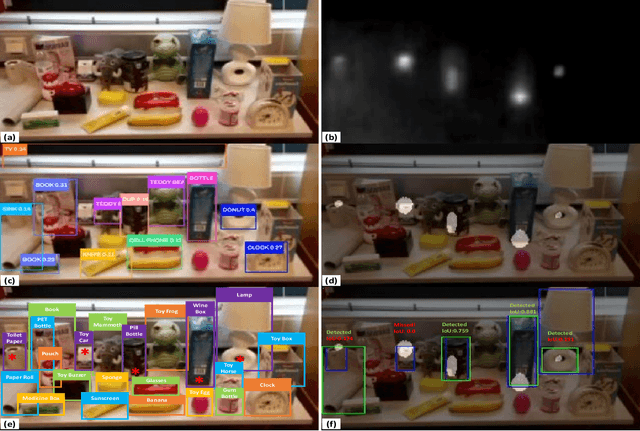
Robots are being designed to help people in an increasing variety of settings--but seemingly little attention has been given so far to the specific needs of women, who represent roughly half of the world's population but are highly underrepresented in robotics. Here we used a speculative prototyping approach to explore this expansive design space: First, we identified some potential challenges of interest, including crimes and illnesses that disproportionately affect women, as well as potential opportunities for designers, which were visualized in five sketches. Then, one of the sketched scenarios was further explored by developing a prototype, of a robotic helper drone equipped with computer vision to detect hidden cameras that could be used to spy on women. While object detection introduced some errors, hidden cameras were identified with a reasonable accuracy of 80\% (Intersection over Union (IoU) score: 0.40). Our aim is that the identified challenges and opportunities could help spark discussion and inspire designers, toward realizing a safer, more inclusive future through responsible use of technology.
Evidential Deep Learning for Class-Incremental Semantic Segmentation
Dec 06, 2022Class-Incremental Learning is a challenging problem in machine learning that aims to extend previously trained neural networks with new classes. This is especially useful if the system is able to classify new objects despite the original training data being unavailable. While the semantic segmentation problem has received less attention than classification, it poses distinct problems and challenges since previous and future target classes can be unlabeled in the images of a single increment. In this case, the background, past and future classes are correlated and there exist a background-shift. In this paper, we address the problem of how to model unlabeled classes while avoiding spurious feature clustering of future uncorrelated classes. We propose to use Evidential Deep Learning to model the evidence of the classes as a Dirichlet distribution. Our method factorizes the problem into a separate foreground class probability, calculated by the expected value of the Dirichlet distribution, and an unknown class (background) probability corresponding to the uncertainty of the estimate. In our novel formulation, the background probability is implicitly modeled, avoiding the feature space clustering that comes from forcing the model to output a high background score for pixels that are not labeled as objects. Experiments on the incremental Pascal VOC, and ADE20k benchmarks show that our method is superior to state-of-the-art, especially when repeatedly learning new classes with increasing number of increments.