 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging Degradation Discrimination and Generation for Universal Image Restoration
Jan 31, 2026Universal image restoration is a critical task in low-level vision, requiring the model to remove various degradations from low-quality images to produce clean images with rich detail. The challenges lie in sampling the distribution of high-quality images and adjusting the outputs on the basis of the degradation. This paper presents a novel approach, Bridging Degradation discrimination and Generation (BDG), which aims to address these challenges concurrently. First, we propose the Multi-Angle and multi-Scale Gray Level Co-occurrence Matrix (MAS-GLCM) and demonstrate its effectiveness in performing fine-grained discrimination of degradation types and levels. Subsequently, we divide the diffusion training process into three distinct stages: generation, bridging, and restoration. The objective is to preserve the diffusion model's capability of restoring rich textures while simultaneously integrating the discriminative information from the MAS-GLCM into the restoration process. This enhances its proficiency in addressing multi-task and multi-degraded scenarios. Without changing the architecture, BDG achieves significant performance gains in all-in-one restoration and real-world super-resolution tasks, primarily evidenced by substantial improvements in fidelity without compromising perceptual quality. The code and pretrained models are provided in https://github.com/MILab-PKU/BDG.
Universal Image Restoration Pre-training via Degradation Classification
Jan 26, 2025This paper proposes the Degradation Classification Pre-Training (DCPT), which enables models to learn how to classify the degradation type of input images for universal image restoration pre-training. Unlike the existing self-supervised pre-training methods, DCPT utilizes the degradation type of the input image as an extremely weak supervision, which can be effortlessly obtained, even intrinsic in all image restoration datasets. DCPT comprises two primary stages. Initially, image features are extracted from the encoder. Subsequently, a lightweight decoder, such as ResNet18, is leveraged to classify the degradation type of the input image solely based on the features extracted in the first stage, without utilizing the input image. The encoder is pre-trained with a straightforward yet potent DCPT, which is used to address universal image restoration and achieve outstanding performance. Following DCPT, both convolutional neural networks (CNNs) and transformers demonstrate performance improvements, with gains of up to 2.55 dB in the 10D all-in-one restoration task and 6.53 dB in the mixed degradation scenarios. Moreover, previous self-supervised pretraining methods, such as masked image modeling, discard the decoder after pre-training, while our DCPT utilizes the pre-trained parameters more effectively. This superiority arises from the degradation classifier acquired during DCPT, which facilitates transfer learning between models of identical architecture trained on diverse degradation types. Source code and models are available at https://github.com/MILab-PKU/dcpt.
Scribble Hides Class: Promoting Scribble-Based Weakly-Supervised Semantic Segmentation with Its Class Label
Feb 27, 2024



Scribble-based weakly-supervised semantic segmentation using sparse scribble supervision is gaining traction as it reduces annotation costs when compared to fully annotated alternatives. Existing methods primarily generate pseudo-labels by diffusing labeled pixels to unlabeled ones with local cues for supervision. However, this diffusion process fails to exploit global semantics and class-specific cues, which are important for semantic segmentation. In this study, we propose a class-driven scribble promotion network, which utilizes both scribble annotations and pseudo-labels informed by image-level classes and global semantics for supervision. Directly adopting pseudo-labels might misguide the segmentation model, thus we design a localization rectification module to correct foreground representations in the feature space. To further combine the advantages of both supervisions, we also introduce a distance entropy loss for uncertainty reduction, which adapts per-pixel confidence weights according to the reliable region determined by the scribble and pseudo-label's boundary. Experiments on the ScribbleSup dataset with different qualities of scribble annotations outperform all the previous methods, demonstrating the superiority and robustness of our method.The code is available at https://github.com/Zxl19990529/Class-driven-Scribble-Promotion-Network.
Multi-level Asymmetric Contrastive Learning for Medical Image Segmentation Pre-training
Sep 21, 2023Contrastive learning, which is a powerful technique for learning image-level representations from unlabeled data, leads a promising direction to dealing with the dilemma between large-scale pre-training and limited labeled data. However, most existing contrastive learning strategies are designed mainly for downstream tasks of natural images, therefore they are sub-optimal and even worse than learning from scratch when directly applied to medical images whose downstream tasks are usually segmentation. In this work, we propose a novel asymmetric contrastive learning framework named JCL for medical image segmentation with self-supervised pre-training. Specifically, (1) A novel asymmetric contrastive learning strategy is proposed to pre-train both encoder and decoder simultaneously in one-stage to provide better initialization for segmentation models. (2) A multi-level contrastive loss is designed to take the correspondence among feature-level, image-level and pixel-level projections, respectively into account to make sure multi-level representations can be learned by the encoder and decoder during pre-training. (3) Experiments on multiple medical image datasets indicate our JCL framework outperforms existing SOTA contrastive learning strategies.
One-Pot Multi-Frame Denoising
Feb 18, 2023The performance of learning-based denoising largely depends on clean supervision. However, it is difficult to obtain clean images in many scenes. On the contrary, the capture of multiple noisy frames for the same field of view is available and often natural in real life. Therefore, it is necessary to avoid the restriction of clean labels and make full use of noisy data for model training. So we propose an unsupervised learning strategy named one-pot denoising (OPD) for multi-frame images. OPD is the first proposed unsupervised multi-frame denoising (MFD) method. Different from the traditional supervision schemes including both supervised Noise2Clean (N2C) and unsupervised Noise2Noise (N2N), OPD executes mutual supervision among all of the multiple frames, which gives learning more diversity of supervision and allows models to mine deeper into the correlation among frames. N2N has also been proved to be actually a simplified case of the proposed OPD. From the perspectives of data allocation and loss function, two specific implementations, random coupling (RC) and alienation loss (AL), are respectively provided to accomplish OPD during model training. In practice, our experiments demonstrate that OPD behaves as the SOTA unsupervised denoising method and is comparable to supervised N2C methods for synthetic Gaussian and Poisson noise, and real-world optical coherence tomography (OCT) speckle noise.
Bagging Regional Classification Activation Maps for Weakly Supervised Object Localization
Jul 16, 2022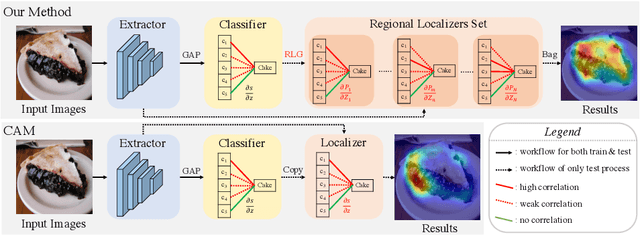
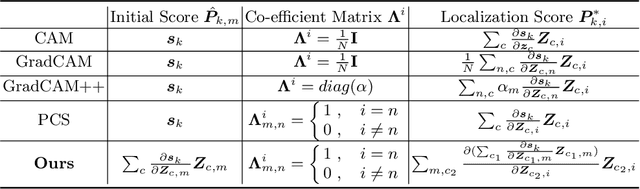
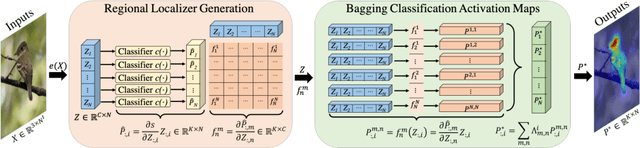
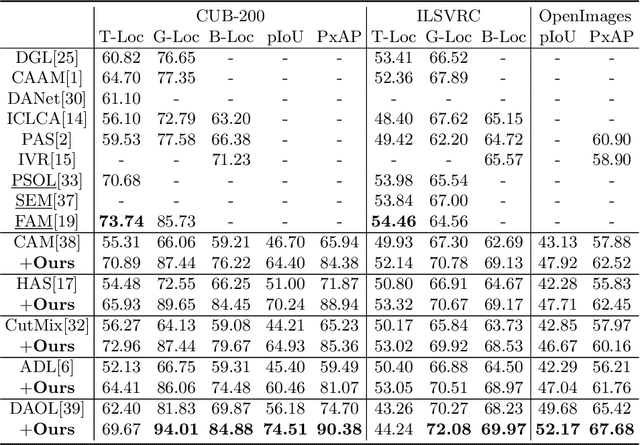
Classification activation map (CAM), utilizing the classification structure to generate pixel-wise localization maps, is a crucial mechanism for weakly supervised object localization (WSOL). However, CAM directly uses the classifier trained on image-level features to locate objects, making it prefers to discern global discriminative factors rather than regional object cues. Thus only the discriminative locations are activated when feeding pixel-level features into this classifier. To solve this issue, this paper elaborates a plug-and-play mechanism called BagCAMs to better project a well-trained classifier for the localization task without refining or re-training the baseline structure. Our BagCAMs adopts a proposed regional localizer generation (RLG) strategy to define a set of regional localizers and then derive them from a well-trained classifier. These regional localizers can be viewed as the base learner that only discerns region-wise object factors for localization tasks, and their results can be effectively weighted by our BagCAMs to form the final localization map. Experiments indicate that adopting our proposed BagCAMs can improve the performance of baseline WSOL methods to a great extent and obtains state-of-the-art performance on three WSOL benchmarks. Code are released at https://github.com/zh460045050/BagCAMs.
Background-aware Classification Activation Map for Weakly Supervised Object Localization
Dec 29, 2021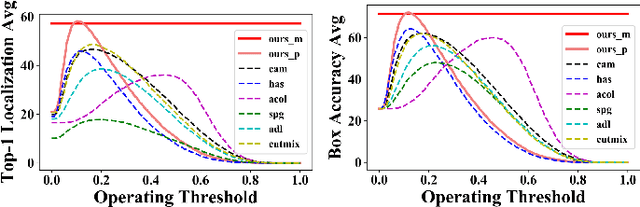
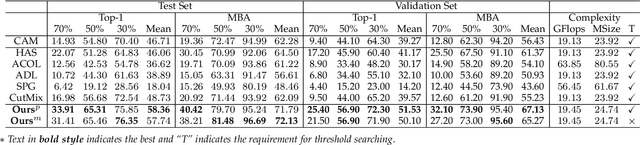
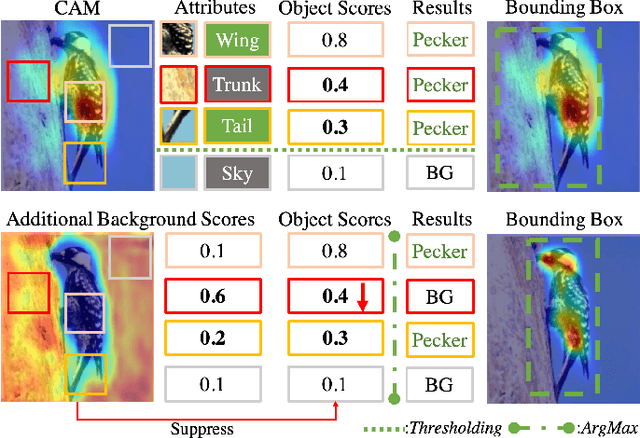
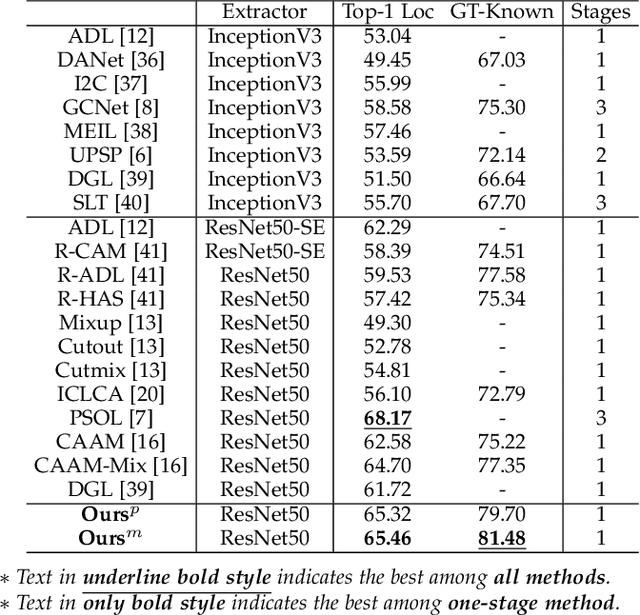
Weakly supervised object localization (WSOL) relaxes the requirement of dense annotations for object localization by using image-level classification masks to supervise its learning process. However, current WSOL methods suffer from excessive activation of background locations and need post-processing to obtain the localization mask. This paper attributes these issues to the unawareness of background cues, and propose the background-aware classification activation map (B-CAM) to simultaneously learn localization scores of both object and background with only image-level labels. In our B-CAM, two image-level features, aggregated by pixel-level features of potential background and object locations, are used to purify the object feature from the object-related background and to represent the feature of the pure-background sample, respectively. Then based on these two features, both the object classifier and the background classifier are learned to determine the binary object localization mask. Our B-CAM can be trained in end-to-end manner based on a proposed stagger classification loss, which not only improves the objects localization but also suppresses the background activation. Experiments show that our B-CAM outperforms one-stage WSOL methods on the CUB-200, OpenImages and VOC2012 datasets.