 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBagging Regional Classification Activation Maps for Weakly Supervised Object Localization
Jul 16, 2022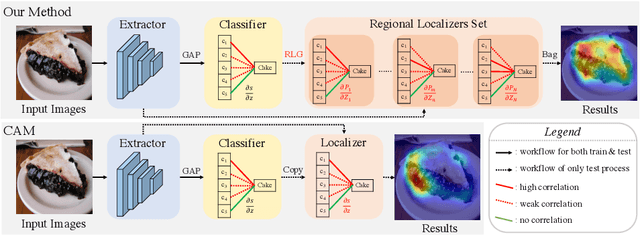
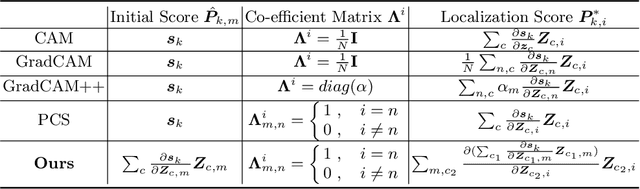
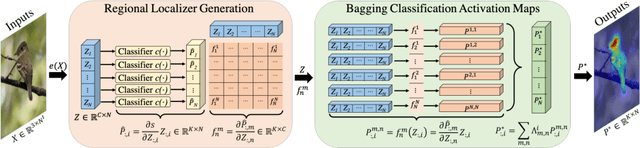
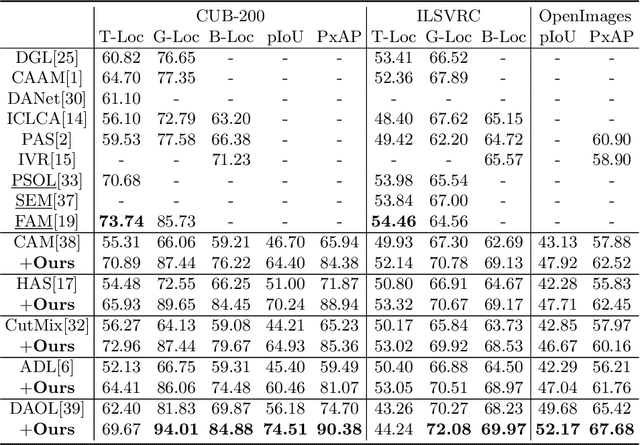
Classification activation map (CAM), utilizing the classification structure to generate pixel-wise localization maps, is a crucial mechanism for weakly supervised object localization (WSOL). However, CAM directly uses the classifier trained on image-level features to locate objects, making it prefers to discern global discriminative factors rather than regional object cues. Thus only the discriminative locations are activated when feeding pixel-level features into this classifier. To solve this issue, this paper elaborates a plug-and-play mechanism called BagCAMs to better project a well-trained classifier for the localization task without refining or re-training the baseline structure. Our BagCAMs adopts a proposed regional localizer generation (RLG) strategy to define a set of regional localizers and then derive them from a well-trained classifier. These regional localizers can be viewed as the base learner that only discerns region-wise object factors for localization tasks, and their results can be effectively weighted by our BagCAMs to form the final localization map. Experiments indicate that adopting our proposed BagCAMs can improve the performance of baseline WSOL methods to a great extent and obtains state-of-the-art performance on three WSOL benchmarks. Code are released at https://github.com/zh460045050/BagCAMs.
Weakly Supervised Object Localization as Domain Adaption
Mar 25, 2022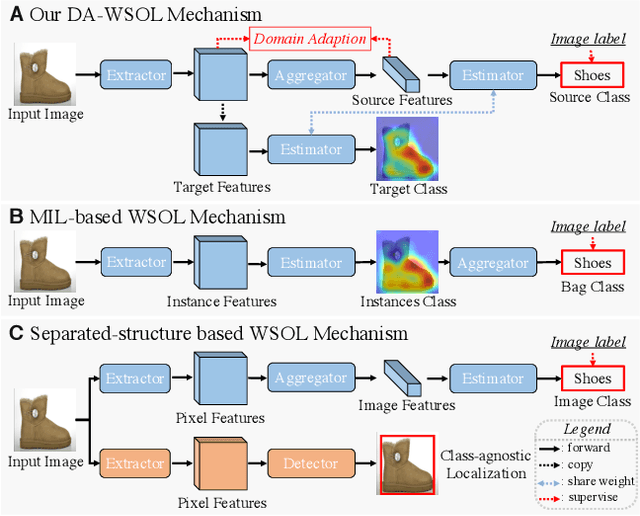
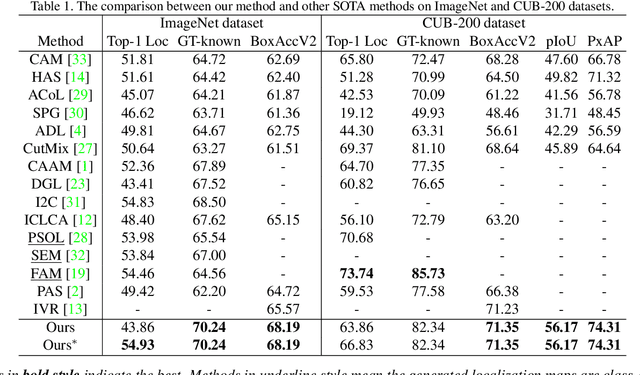
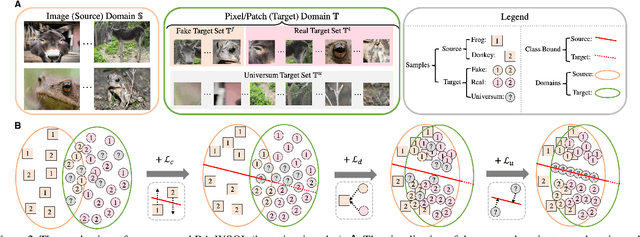
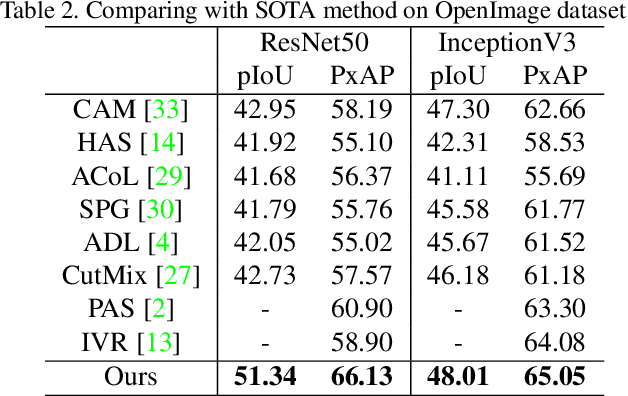
Weakly supervised object localization (WSOL) focuses on localizing objects only with the supervision of image-level classification masks. Most previous WSOL methods follow the classification activation map (CAM) that localizes objects based on the classification structure with the multi-instance learning (MIL) mechanism. However, the MIL mechanism makes CAM only activate discriminative object parts rather than the whole object, weakening its performance for localizing objects. To avoid this problem, this work provides a novel perspective that models WSOL as a domain adaption (DA) task, where the score estimator trained on the source/image domain is tested on the target/pixel domain to locate objects. Under this perspective, a DA-WSOL pipeline is designed to better engage DA approaches into WSOL to enhance localization performance. It utilizes a proposed target sampling strategy to select different types of target samples. Based on these types of target samples, domain adaption localization (DAL) loss is elaborated. It aligns the feature distribution between the two domains by DA and makes the estimator perceive target domain cues by Universum regularization. Experiments show that our pipeline outperforms SOTA methods on multi benchmarks. Code are released at \url{https://github.com/zh460045050/DA-WSOL_CVPR2022}.
Background-aware Classification Activation Map for Weakly Supervised Object Localization
Dec 29, 2021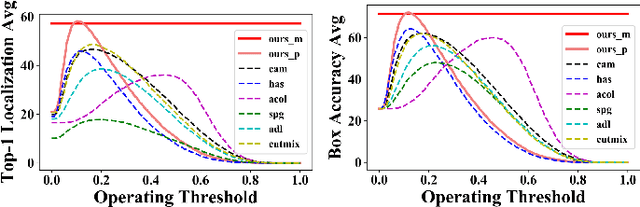
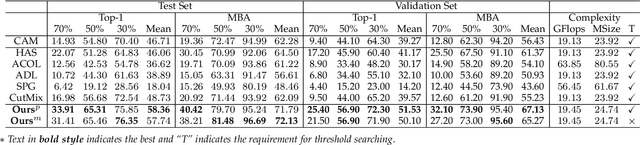
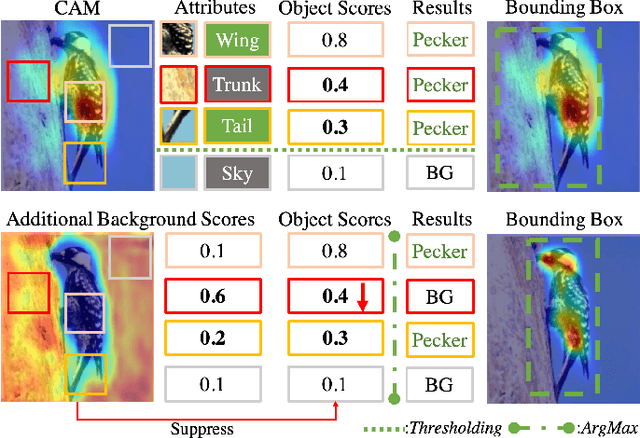
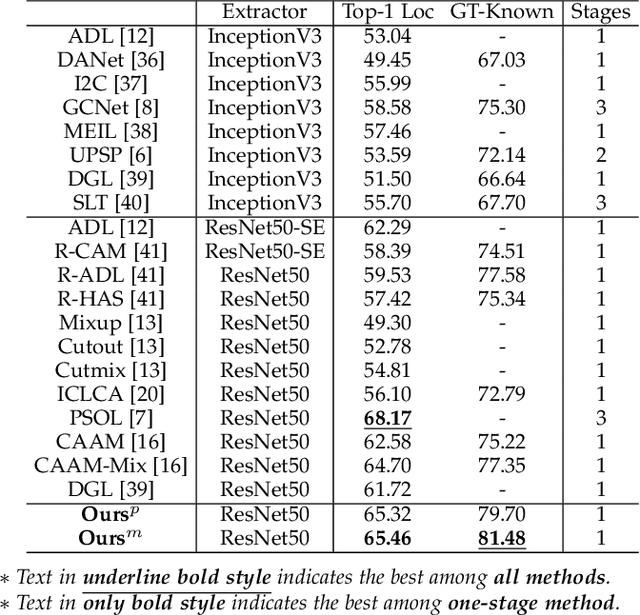
Weakly supervised object localization (WSOL) relaxes the requirement of dense annotations for object localization by using image-level classification masks to supervise its learning process. However, current WSOL methods suffer from excessive activation of background locations and need post-processing to obtain the localization mask. This paper attributes these issues to the unawareness of background cues, and propose the background-aware classification activation map (B-CAM) to simultaneously learn localization scores of both object and background with only image-level labels. In our B-CAM, two image-level features, aggregated by pixel-level features of potential background and object locations, are used to purify the object feature from the object-related background and to represent the feature of the pure-background sample, respectively. Then based on these two features, both the object classifier and the background classifier are learned to determine the binary object localization mask. Our B-CAM can be trained in end-to-end manner based on a proposed stagger classification loss, which not only improves the objects localization but also suppresses the background activation. Experiments show that our B-CAM outperforms one-stage WSOL methods on the CUB-200, OpenImages and VOC2012 datasets.