 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Aware Annotation Protocol to Evaluate Deformable Registration Algorithms
Apr 02, 2021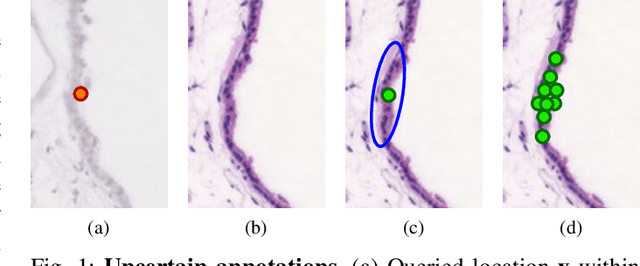
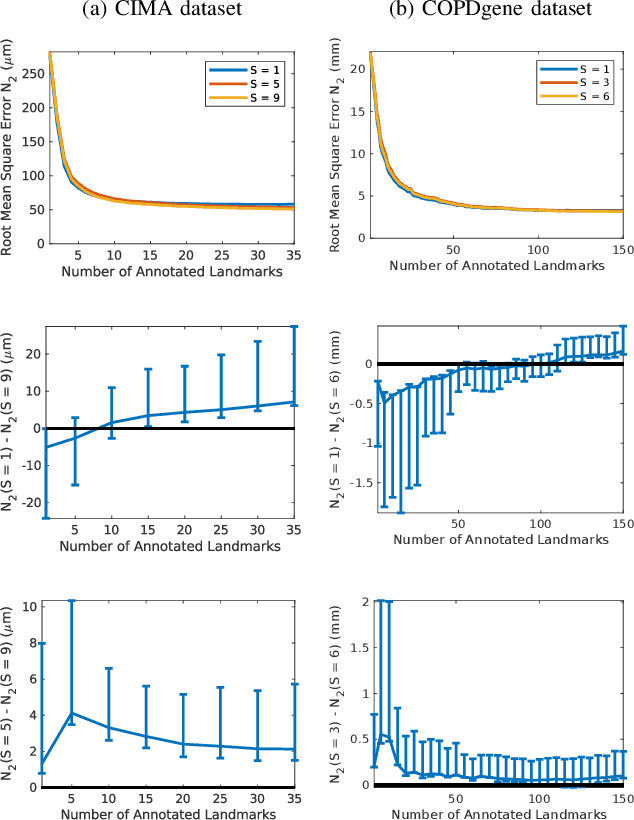
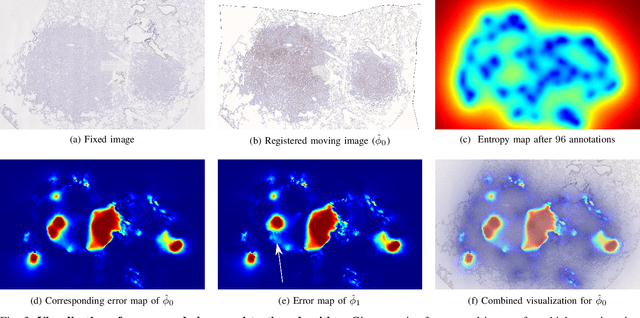
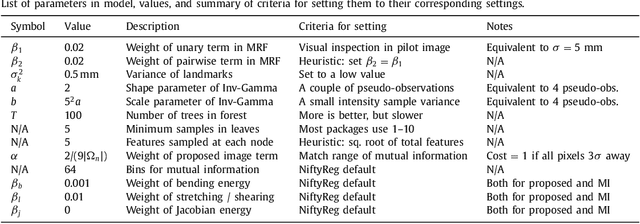
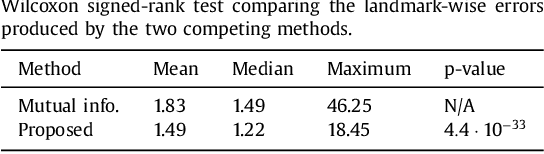
Landmark correspondences are a widely used type of gold standard in image registration. However, the manual placement of corresponding points is subject to high inter-user variability in the chosen annotated locations and in the interpretation of visual ambiguities. In this paper, we introduce a principled strategy for the construction of a gold standard in deformable registration. Our framework: (i) iteratively suggests the most informative location to annotate next, taking into account its redundancy with previous annotations; (ii) extends traditional pointwise annotations by accounting for the spatial uncertainty of each annotation, which can either be directly specified by the user, or aggregated from pointwise annotations from multiple experts; and (iii) naturally provides a new strategy for the evaluation of deformable registration algorithms. Our approach is validated on four different registration tasks. The experimental results show the efficacy of suggesting annotations according to their informativeness, and an improved capacity to assess the quality of the outputs of registration algorithms. In addition, our approach yields, from sparse annotations only, a dense visualization of the errors made by a registration method. The source code of our approach supporting both 2D and 3D data is publicly available at https://github.com/LoicPeter/evaluation-deformable-registration.
Active Annotation of Informative Overlapping Frames in Video Mosaicking Applications
Dec 30, 2020

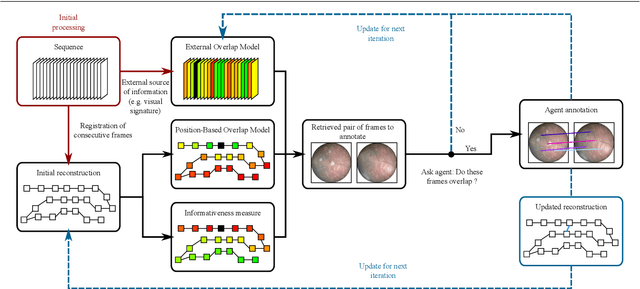
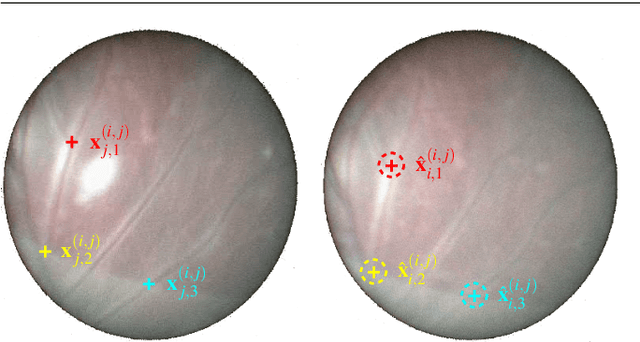
Video mosaicking requires the registration of overlapping frames located at distant timepoints in the sequence to ensure global consistency of the reconstructed scene. However, fully automated registration of such long-range pairs is (i) challenging when the registration of images itself is difficult; and (ii) computationally expensive for long sequences due to the large number of candidate pairs for registration. In this paper, we introduce an efficient framework for the active annotation of long-range pairwise correspondences in a sequence. Our framework suggests pairs of images that are sought to be informative to an oracle agent (e.g., a human user, or a reliable matching algorithm) who provides visual correspondences on each suggested pair. Informative pairs are retrieved according to an iterative strategy based on a principled annotation reward coupled with two complementary and online adaptable models of frame overlap. In addition to the efficient construction of a mosaic, our framework provides, as a by-product, ground truth landmark correspondences which can be used for evaluation or learning purposes. We evaluate our approach in both automated and interactive scenarios via experiments on synthetic sequences, on a publicly available dataset for aerial imaging and on a clinical dataset for placenta mosaicking during fetal surgery.
Joint registration and synthesis using a probabilistic model for alignment of MRI and histological sections
Jan 16, 2018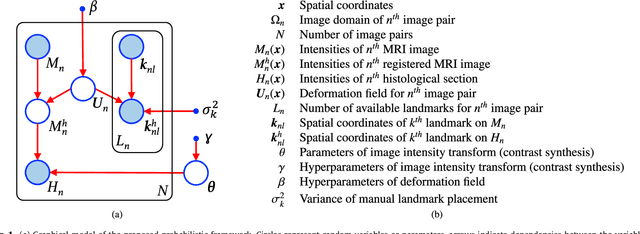
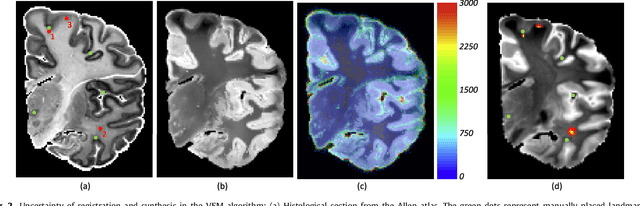
Nonlinear registration of 2D histological sections with corresponding slices of MRI data is a critical step of 3D histology reconstruction. This task is difficult due to the large differences in image contrast and resolution, as well as the complex nonrigid distortions produced when sectioning the sample and mounting it on the glass slide. It has been shown in brain MRI registration that better spatial alignment across modalities can be obtained by synthesizing one modality from the other and then using intra-modality registration metrics, rather than by using mutual information (MI) as metric. However, such an approach typically requires a database of aligned images from the two modalities, which is very difficult to obtain for histology/MRI. Here, we overcome this limitation with a probabilistic method that simultaneously solves for registration and synthesis directly on the target images, without any training data. In our model, the MRI slice is assumed to be a contrast-warped, spatially deformed version of the histological section. We use approximate Bayesian inference to iteratively refine the probabilistic estimate of the synthesis and the registration, while accounting for each other's uncertainty. Moreover, manually placed landmarks can be seamlessly integrated in the framework for increased performance. Experiments on a synthetic dataset show that, compared with MI, the proposed method makes it possible to use a much more flexible deformation model in the registration to improve its accuracy, without compromising robustness. Moreover, our framework also exploits information in manually placed landmarks more efficiently than MI, since landmarks inform both synthesis and registration - as opposed to registration alone. Finally, we show qualitative results on the public Allen atlas, in which the proposed method provides a clear improvement over MI based registration.
Hands-Free Segmentation of Medical Volumes via Binary Inputs
Sep 20, 2016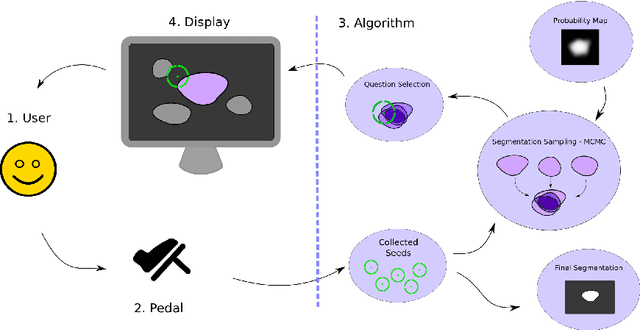
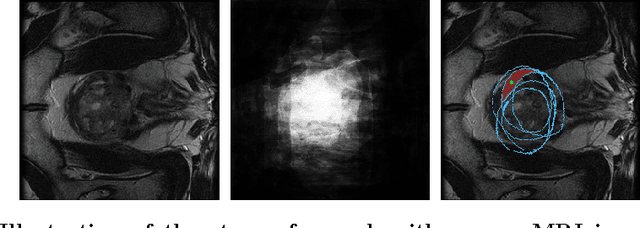
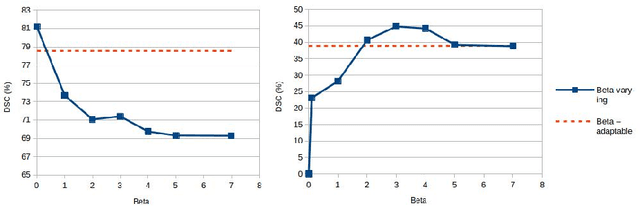
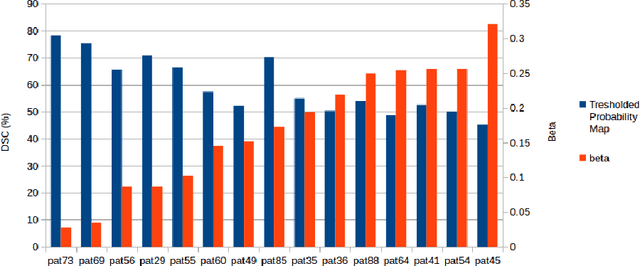
We propose a novel hands-free method to interactively segment 3D medical volumes. In our scenario, a human user progressively segments an organ by answering a series of questions of the form "Is this voxel inside the object to segment?". At each iteration, the chosen question is defined as the one halving a set of candidate segmentations given the answered questions. For a quick and efficient exploration, these segmentations are sampled according to the Metropolis-Hastings algorithm. Our sampling technique relies on a combination of relaxed shape prior, learnt probability map and consistency with previous answers. We demonstrate the potential of our strategy on a prostate segmentation MRI dataset. Through the study of failure cases with synthetic examples, we demonstrate the adaptation potential of our method. We also show that our method outperforms two intuitive baselines: one based on random questions, the other one being the thresholded probability map.
Semi-Automatic Segmentation of Autosomal Dominant Polycystic Kidneys using Random Forests
Oct 23, 2015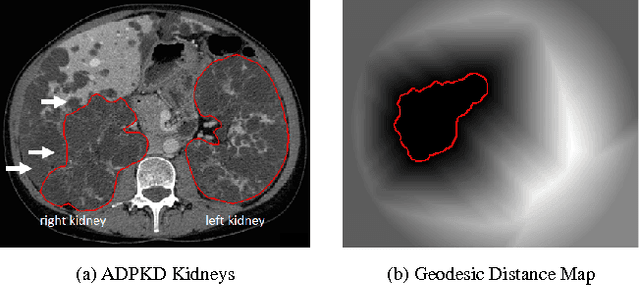
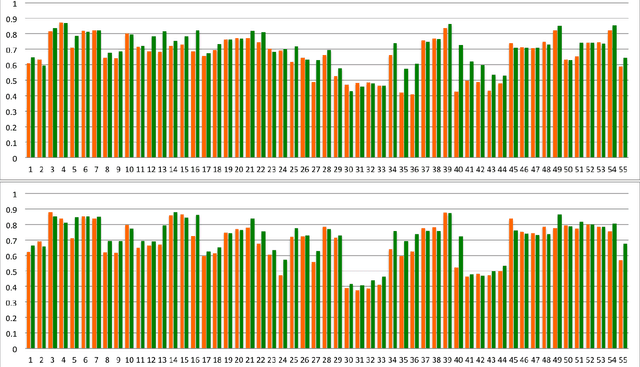
This paper presents a method for 3D segmentation of kidneys from patients with autosomal dominant polycystic kidney disease (ADPKD) and severe renal insufficiency, using computed tomography (CT) data. ADPKD severely alters the shape of the kidneys due to non-uniform formation of cysts. As a consequence, fully automatic segmentation of such kidneys is very challenging. We present a segmentation method with minimal user interaction based on a random forest classifier. One of the major novelties of the proposed approach is the usage of geodesic distance volumes as additional source of information. These volumes contain the intensity weighted distance to a manual outline of the respective kidney in only one slice (for each kidney) of the CT volume. We evaluate our method qualitatively and quantitatively on 55 CT acquisitions using ground truth annotations from clinical experts.