 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeS-MUSt3R: Sliding Multi-view 3D Reconstruction
Feb 04, 2026The recent paradigm shift in 3D vision led to the rise of foundation models with remarkable capabilities in 3D perception from uncalibrated images. However, extending these models to large-scale RGB stream 3D reconstruction remains challenging due to memory limitations. This work proposes S-MUSt3R, a simple and efficient pipeline that extends the limits of foundation models for monocular 3D reconstruction. Our approach addresses the scalability bottleneck of foundation models through a simple strategy of sequence segmentation followed by segment alignment and lightweight loop closure optimization. Without model retraining, we benefit from remarkable 3D reconstruction capacities of MUSt3R model and achieve trajectory and reconstruction performance comparable to traditional methods with more complex architecture. We evaluate S-MUSt3R on TUM, 7-Scenes and proprietary robot navigation datasets and show that S-MUSt3R runs successfully on long RGB sequences and produces accurate and consistent 3D reconstruction. Our results highlight the potential of leveraging the MUSt3R model for scalable monocular 3D scene in real-world settings, with an important advantage of making predictions directly in the metric space.
PanSt3R: Multi-view Consistent Panoptic Segmentation
Jun 26, 2025Panoptic segmentation of 3D scenes, involving the segmentation and classification of object instances in a dense 3D reconstruction of a scene, is a challenging problem, especially when relying solely on unposed 2D images. Existing approaches typically leverage off-the-shelf models to extract per-frame 2D panoptic segmentations, before optimizing an implicit geometric representation (often based on NeRF) to integrate and fuse the 2D predictions. We argue that relying on 2D panoptic segmentation for a problem inherently 3D and multi-view is likely suboptimal as it fails to leverage the full potential of spatial relationships across views. In addition to requiring camera parameters, these approaches also necessitate computationally expensive test-time optimization for each scene. Instead, in this work, we propose a unified and integrated approach PanSt3R, which eliminates the need for test-time optimization by jointly predicting 3D geometry and multi-view panoptic segmentation in a single forward pass. Our approach builds upon recent advances in 3D reconstruction, specifically upon MUSt3R, a scalable multi-view version of DUSt3R, and enhances it with semantic awareness and multi-view panoptic segmentation capabilities. We additionally revisit the standard post-processing mask merging procedure and introduce a more principled approach for multi-view segmentation. We also introduce a simple method for generating novel-view predictions based on the predictions of PanSt3R and vanilla 3DGS. Overall, the proposed PanSt3R is conceptually simple, yet fast and scalable, and achieves state-of-the-art performance on several benchmarks, while being orders of magnitude faster than existing methods.
Reasoning in visual navigation of end-to-end trained agents: a dynamical systems approach
Mar 12, 2025Progress in Embodied AI has made it possible for end-to-end-trained agents to navigate in photo-realistic environments with high-level reasoning and zero-shot or language-conditioned behavior, but benchmarks are still dominated by simulation. In this work, we focus on the fine-grained behavior of fast-moving real robots and present a large-scale experimental study involving \numepisodes{} navigation episodes in a real environment with a physical robot, where we analyze the type of reasoning emerging from end-to-end training. In particular, we study the presence of realistic dynamics which the agent learned for open-loop forecasting, and their interplay with sensing. We analyze the way the agent uses latent memory to hold elements of the scene structure and information gathered during exploration. We probe the planning capabilities of the agent, and find in its memory evidence for somewhat precise plans over a limited horizon. Furthermore, we show in a post-hoc analysis that the value function learned by the agent relates to long-term planning. Put together, our experiments paint a new picture on how using tools from computer vision and sequential decision making have led to new capabilities in robotics and control. An interactive tool is available at europe.naverlabs.com/research/publications/reasoning-in-visual-navigation-of-end-to-end-trained-agents.
MUSt3R: Multi-view Network for Stereo 3D Reconstruction
Mar 03, 2025DUSt3R introduced a novel paradigm in geometric computer vision by proposing a model that can provide dense and unconstrained Stereo 3D Reconstruction of arbitrary image collections with no prior information about camera calibration nor viewpoint poses. Under the hood, however, DUSt3R processes image pairs, regressing local 3D reconstructions that need to be aligned in a global coordinate system. The number of pairs, growing quadratically, is an inherent limitation that becomes especially concerning for robust and fast optimization in the case of large image collections. In this paper, we propose an extension of DUSt3R from pairs to multiple views, that addresses all aforementioned concerns. Indeed, we propose a Multi-view Network for Stereo 3D Reconstruction, or MUSt3R, that modifies the DUSt3R architecture by making it symmetric and extending it to directly predict 3D structure for all views in a common coordinate frame. Second, we entail the model with a multi-layer memory mechanism which allows to reduce the computational complexity and to scale the reconstruction to large collections, inferring thousands of 3D pointmaps at high frame-rates with limited added complexity. The framework is designed to perform 3D reconstruction both offline and online, and hence can be seamlessly applied to SfM and visual SLAM scenarios showing state-of-the-art performance on various 3D downstream tasks, including uncalibrated Visual Odometry, relative camera pose, scale and focal estimation, 3D reconstruction and multi-view depth estimation.
3D-Consistent Image Inpainting with Diffusion Models
Dec 08, 2024We address the problem of 3D inconsistency of image inpainting based on diffusion models. We propose a generative model using image pairs that belong to the same scene. To achieve the 3D-consistent and semantically coherent inpainting, we modify the generative diffusion model by incorporating an alternative point of view of the scene into the denoising process. This creates an inductive bias that allows to recover 3D priors while training to denoise in 2D, without explicit 3D supervision. Training unconditional diffusion models with additional images as in-context guidance allows to harmonize the masked and non-masked regions while repainting and ensures the 3D consistency. We evaluate our method on one synthetic and three real-world datasets and show that it generates semantically coherent and 3D-consistent inpaintings and outperforms the state-of-art methods.
Self-supervised Pretraining and Finetuning for Monocular Depth and Visual Odometry
Jun 16, 2024For the task of simultaneous monocular depth and visual odometry estimation, we propose learning self-supervised transformer-based models in two steps. Our first step consists in a generic pretraining to learn 3D geometry, using cross-view completion objective (CroCo), followed by self-supervised finetuning on non-annotated videos. We show that our self-supervised models can reach state-of-the-art performance 'without bells and whistles' using standard components such as visual transformers, dense prediction transformers and adapters. We demonstrate the effectiveness of our proposed method by running evaluations on six benchmark datasets, both static and dynamic, indoor and outdoor, with synthetic and real images. For all datasets, our method outperforms state-of-the-art methods, in particular for depth prediction task.
Zero-BEV: Zero-shot Projection of Any First-Person Modality to BEV Maps
Feb 21, 2024Bird's-eye view (BEV) maps are an important geometrically structured representation widely used in robotics, in particular self-driving vehicles and terrestrial robots. Existing algorithms either require depth information for the geometric projection, which is not always reliably available, or are trained end-to-end in a fully supervised way to map visual first-person observations to BEV representation, and are therefore restricted to the output modality they have been trained for. In contrast, we propose a new model capable of performing zero-shot projections of any modality available in a first person view to the corresponding BEV map. This is achieved by disentangling the geometric inverse perspective projection from the modality transformation, eg. RGB to occupancy. The method is general and we showcase experiments projecting to BEV three different modalities: semantic segmentation, motion vectors and object bounding boxes detected in first person. We experimentally show that the model outperforms competing methods, in particular the widely used baseline resorting to monocular depth estimation.
Learning to navigate efficiently and precisely in real environments
Jan 25, 2024In the context of autonomous navigation of terrestrial robots, the creation of realistic models for agent dynamics and sensing is a widespread habit in the robotics literature and in commercial applications, where they are used for model based control and/or for localization and mapping. The more recent Embodied AI literature, on the other hand, focuses on modular or end-to-end agents trained in simulators like Habitat or AI-Thor, where the emphasis is put on photo-realistic rendering and scene diversity, but high-fidelity robot motion is assigned a less privileged role. The resulting sim2real gap significantly impacts transfer of the trained models to real robotic platforms. In this work we explore end-to-end training of agents in simulation in settings which minimize the sim2real gap both, in sensing and in actuation. Our agent directly predicts (discretized) velocity commands, which are maintained through closed-loop control in the real robot. The behavior of the real robot (including the underlying low-level controller) is identified and simulated in a modified Habitat simulator. Noise models for odometry and localization further contribute in lowering the sim2real gap. We evaluate on real navigation scenarios, explore different localization and point goal calculation methods and report significant gains in performance and robustness compared to prior work.
End-to-End -Image Goal Navigation through Correspondence as an Emergent Phenomenon
Sep 28, 2023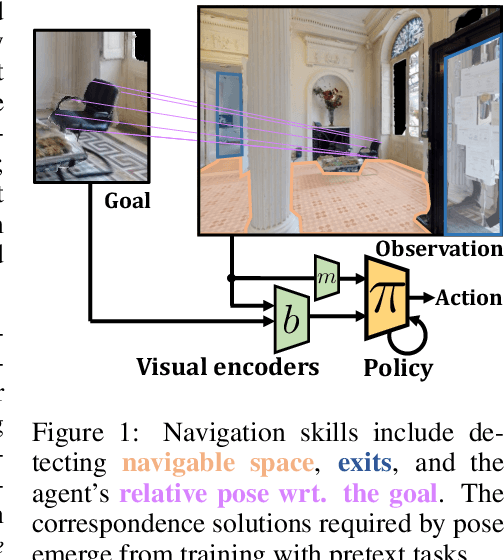

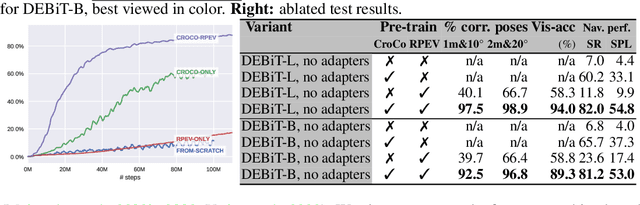
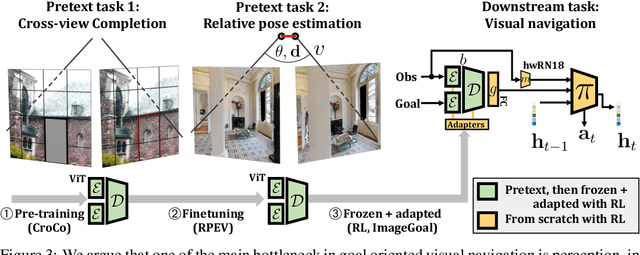
Most recent work in goal oriented visual navigation resorts to large-scale machine learning in simulated environments. The main challenge lies in learning compact representations generalizable to unseen environments and in learning high-capacity perception modules capable of reasoning on high-dimensional input. The latter is particularly difficult when the goal is not given as a category ("ObjectNav") but as an exemplar image ("ImageNav"), as the perception module needs to learn a comparison strategy requiring to solve an underlying visual correspondence problem. This has been shown to be difficult from reward alone or with standard auxiliary tasks. We address this problem through a sequence of two pretext tasks, which serve as a prior for what we argue is one of the main bottleneck in perception, extremely wide-baseline relative pose estimation and visibility prediction in complex scenes. The first pretext task, cross-view completion is a proxy for the underlying visual correspondence problem, while the second task addresses goal detection and finding directly. We propose a new dual encoder with a large-capacity binocular ViT model and show that correspondence solutions naturally emerge from the training signals. Experiments show significant improvements and SOTA performance on the two benchmarks, ImageNav and the Instance-ImageNav variant, where camera intrinsics and height differ between observation and goal.
Learning with a Mole: Transferable latent spatial representations for navigation without reconstruction
Jun 06, 2023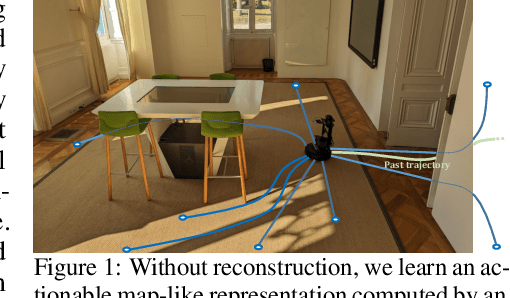
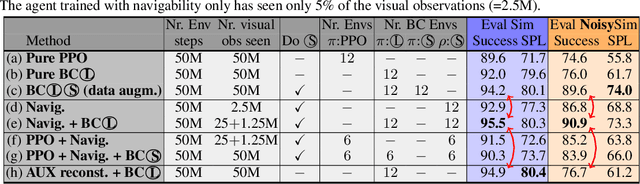
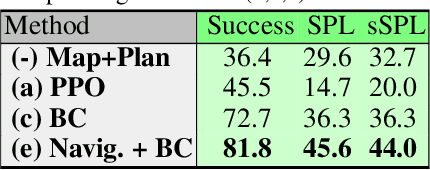
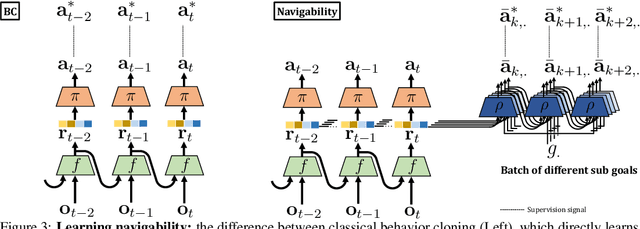
Agents navigating in 3D environments require some form of memory, which should hold a compact and actionable representation of the history of observations useful for decision taking and planning. In most end-to-end learning approaches the representation is latent and usually does not have a clearly defined interpretation, whereas classical robotics addresses this with scene reconstruction resulting in some form of map, usually estimated with geometry and sensor models and/or learning. In this work we propose to learn an actionable representation of the scene independently of the targeted downstream task and without explicitly optimizing reconstruction. The learned representation is optimized by a blind auxiliary agent trained to navigate with it on multiple short sub episodes branching out from a waypoint and, most importantly, without any direct visual observation. We argue and show that the blindness property is important and forces the (trained) latent representation to be the only means for planning. With probing experiments we show that the learned representation optimizes navigability and not reconstruction. On downstream tasks we show that it is robust to changes in distribution, in particular the sim2real gap, which we evaluate with a real physical robot in a real office building, significantly improving performance.