 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Similarity Priors: Neural Collages as Differentiable Fractal Representations
Apr 15, 2022Many patterns in nature exhibit self-similarity: they can be compactly described via self-referential transformations. Said patterns commonly appear in natural and artificial objects, such as molecules, shorelines, galaxies and even images. In this work, we investigate the role of learning in the automated discovery of self-similarity and in its utilization for downstream tasks. To this end, we design a novel class of implicit operators, Neural Collages, which (1) represent data as the parameters of a self-referential, structured transformation, and (2) employ hypernetworks to amortize the cost of finding these parameters to a single forward pass. We investigate how to leverage the representations produced by Neural Collages in various tasks, including data compression and generation. Neural Collages image compressors are orders of magnitude faster than other self-similarity-based algorithms during encoding and offer compression rates competitive with implicit methods. Finally, we showcase applications of Neural Collages for fractal art and as deep generative models.
LISA: Learning Interpretable Skill Abstractions from Language
Feb 28, 2022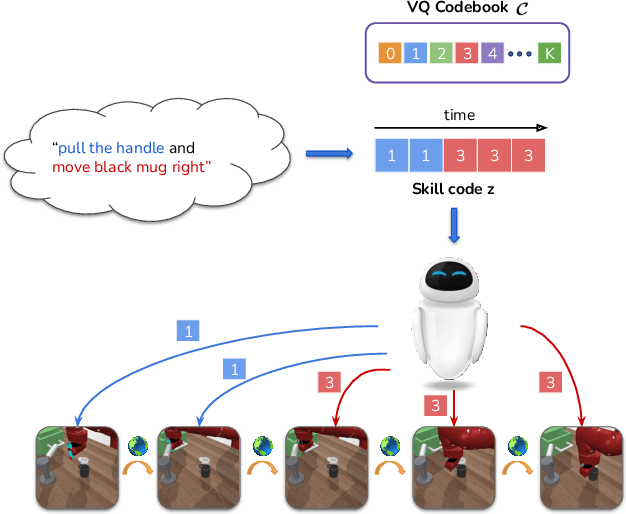


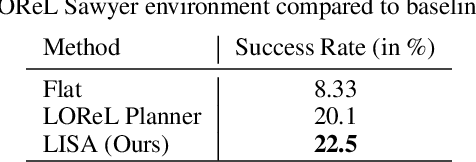
Learning policies that effectually utilize language instructions in complex, multi-task environments is an important problem in imitation learning. While it is possible to condition on the entire language instruction directly, such an approach could suffer from generalization issues. To encode complex instructions into skills that can generalize to unseen instructions, we propose Learning Interpretable Skill Abstractions (LISA), a hierarchical imitation learning framework that can learn diverse, interpretable skills from language-conditioned demonstrations. LISA uses vector quantization to learn discrete skill codes that are highly correlated with language instructions and the behavior of the learned policy. In navigation and robotic manipulation environments, LISA is able to outperform a strong non-hierarchical baseline in the low data regime and compose learned skills to solve tasks containing unseen long-range instructions. Our method demonstrates a more natural way to condition on language in sequential decision-making problems and achieve interpretable and controllable behavior with the learned skills.
Imitation with Neural Density Models
Oct 19, 2020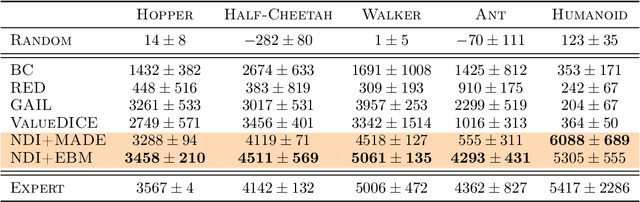
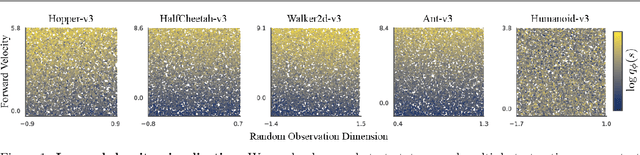
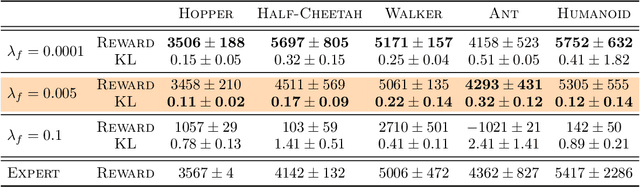
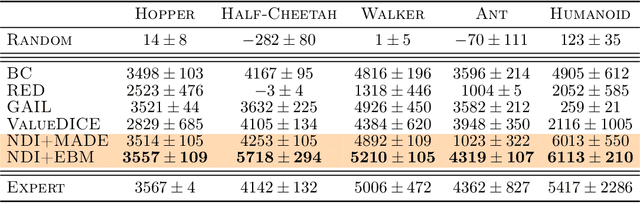
We propose a new framework for Imitation Learning (IL) via density estimation of the expert's occupancy measure followed by Maximum Occupancy Entropy Reinforcement Learning (RL) using the density as a reward. Our approach maximizes a non-adversarial model-free RL objective that provably lower bounds reverse Kullback-Leibler divergence between occupancy measures of the expert and imitator. We present a practical IL algorithm, Neural Density Imitation (NDI), which obtains state-of-the-art demonstration efficiency on benchmark control tasks.
Active World Model Learning with Progress Curiosity
Jul 15, 2020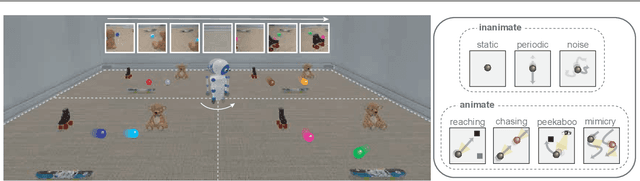
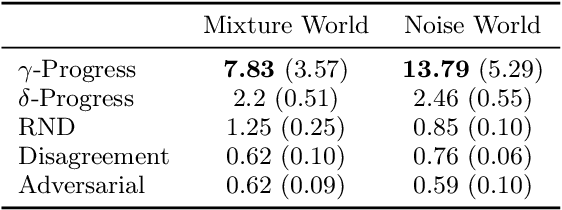
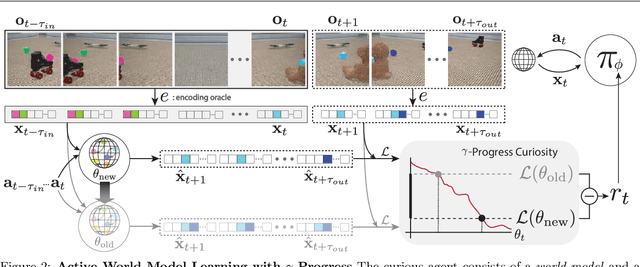
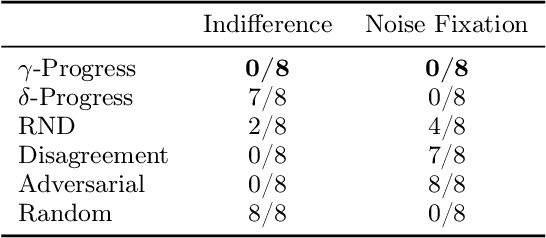
World models are self-supervised predictive models of how the world evolves. Humans learn world models by curiously exploring their environment, in the process acquiring compact abstractions of high bandwidth sensory inputs, the ability to plan across long temporal horizons, and an understanding of the behavioral patterns of other agents. In this work, we study how to design such a curiosity-driven Active World Model Learning (AWML) system. To do so, we construct a curious agent building world models while visually exploring a 3D physical environment rich with distillations of representative real-world agents. We propose an AWML system driven by $\gamma$-Progress: a scalable and effective learning progress-based curiosity signal. We show that $\gamma$-Progress naturally gives rise to an exploration policy that directs attention to complex but learnable dynamics in a balanced manner, thus overcoming the "white noise problem". As a result, our $\gamma$-Progress-driven controller achieves significantly higher AWML performance than baseline controllers equipped with state-of-the-art exploration strategies such as Random Network Distillation and Model Disagreement.
ThreeDWorld: A Platform for Interactive Multi-Modal Physical Simulation
Jul 09, 2020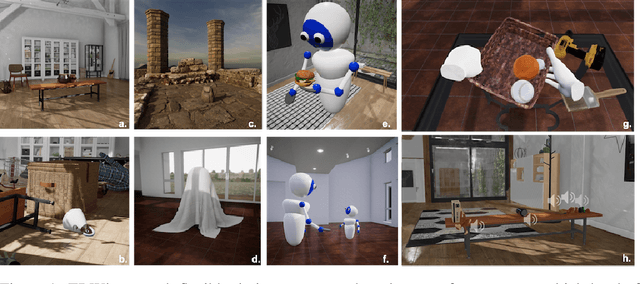
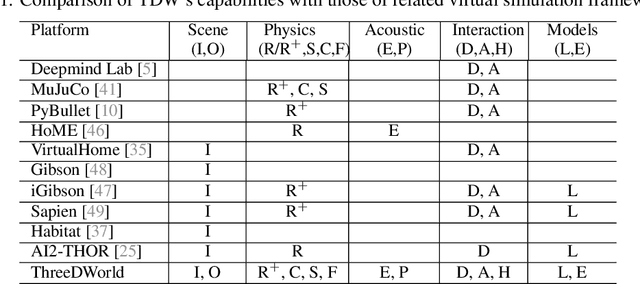

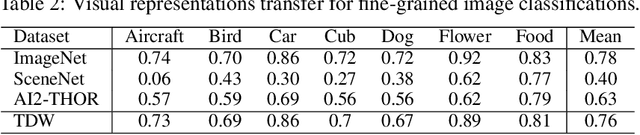
We introduce ThreeDWorld (TDW), a platform for interactive multi-modal physical simulation. With TDW, users can simulate high-fidelity sensory data and physical interactions between mobile agents and objects in a wide variety of rich 3D environments. TDW has several unique properties: 1) realtime near photo-realistic image rendering quality; 2) a library of objects and environments with materials for high-quality rendering, and routines enabling user customization of the asset library; 3) generative procedures for efficiently building classes of new environments 4) high-fidelity audio rendering; 5) believable and realistic physical interactions for a wide variety of material types, including cloths, liquid, and deformable objects; 6) a range of "avatar" types that serve as embodiments of AI agents, with the option for user avatar customization; and 7) support for human interactions with VR devices. TDW also provides a rich API enabling multiple agents to interact within a simulation and return a range of sensor and physics data representing the state of the world. We present initial experiments enabled by the platform around emerging research directions in computer vision, machine learning, and cognitive science, including multi-modal physical scene understanding, multi-agent interactions, models that "learn like a child", and attention studies in humans and neural networks. The simulation platform will be made publicly available.