Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation with Neural Density Models
Paper and Code
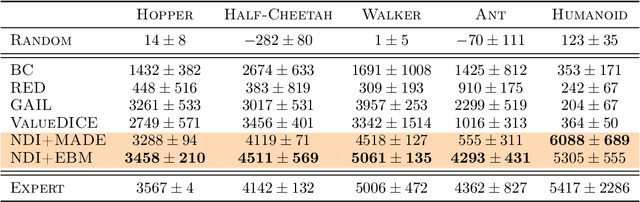
We propose a new framework for Imitation Learning (IL) via density estimation of the expert's occupancy measure followed by Maximum Occupancy Entropy Reinforcement Learning (RL) using the density as a reward. Our approach maximizes a non-adversarial model-free RL objective that provably lower bounds reverse Kullback-Leibler divergence between occupancy measures of the expert and imitator. We present a practical IL algorithm, Neural Density Imitation (NDI), which obtains state-of-the-art demonstration efficiency on benchmark control tasks.
View paper on
 OpenReview
OpenReview